
Как сделать актуатор или микросервомашинка своими руками
25 января 2022 | BalticAvia начинает тему «Собираю впервые в жизни квадрокоптер-дальнолёт» на форуме «Самодельные проекты» | |
Приветствую, уважаемое сообщество. Преамбула: От кабинетной работы потянуло поинженерить. Задумал собрать первый квадрокоптер. То есть, вообще, впервые в своей жизни. Начал с теории…. | ||
19 января 2022 | Anatoly84 начинает тему «Продам квадрокоптер Autel Evo 2 pro 6К» на форуме «Куплю — продам» | |
Предлагаю к продаже квадрокоптер Autel Evo 2 pro Rugged Bundle. В комплекте: Дрон Кейс Доп.винты Карта памяти самсунг эво Доп.аккумулятор Камера 6к Дрон приобретался в июне 2021. За… | ||
8 декабря 2021 | konst отвечает в теме «СверхТяжелый Коптер» на форуме «Самодельные проекты» | |
Вы слишком сильно размахнулись! Сначала стоит сделать прототип весом в 150-200 кг и на нем отработать компоновку и настройку ПО. В отличии от готовых дронов, собранный из различных компонентов не… | ||
20 сентября 2021 | konst отвечает в теме «xiro xplorer 4k несколько вопросов» на форуме «Покупные квадрокоптеры» | |
Судя по всему — контора сдохла. Везде распродают остатки дронов. Аккумуляторы к XPLORER 4K найти практически невозможно -а это показатель, тк 90% дохода продажа расходок и навар с аккумуляторов… | ||
13 сентября 2021 | konst отвечает в теме «Что за квадрик?» на форуме «Покупные квадрокоптеры» | |
Да можно. | ||
28 августа 2021 | ||
Скорее всего регулятор идущий на мотор мозги компосирует. Пробило мосфет и одна фаза не работает или работает через ж… Подобное бывает и при пробое обмоток двигателя, например — двигатель на 2S… | ||
19 августа 2021 | yar1s начинает тему «Не биндится R9» на форуме «Другая электроника» | |
Подскажите, приемник R9M(прошивка ACCESS_v1.3.1), аппа frsky x9lite(прошивка v2.3.12) с внешним модулем R9MLite pro. Проблема: запускаю процесс регистрации на аппаратуре, подаю питание на приемник… | ||
 Любой DJI позволяет передавать видео на 2 и более километра.
Любой DJI позволяет передавать видео на 2 и более километра.Автоматические распашные ворота своими руками: самодельные приводы
После самостоятельной установки распашных ворот, у многих появляются мысли по самостоятельному изготовлению автоматики. Подумайте над несколькими вариантами автоматики, собранной из различных элементов, которые позволят сделать автоматические распашные ворота своими руками.
Подумайте над несколькими вариантами автоматики, собранной из различных элементов, которые позволят сделать автоматические распашные ворота своими руками.
Разумеется, соперничать с европейскими компаниями, производящими качественную автоматику для различных ворот, не имеет смысла. При наличии достаточного количества денег лучшим вариантом будет заказать комплект автоматики у известных производителей, однако даже при отсутствии достаточных финансовых возможностей автоматику сделать можно, ведь красиво жить не запретишь.
Самодельные автоматические приводы
Если Вам непременно хочется самостоятельно создать или переделать что-то для автоматического открывания ворот, то уже имеются опробованные идеи. Попробуйте и Вы.
Автоматические приводы на основе:
- Автомобильных домкратов.
- Рулевых реек.
- Поворотных механизмов от спутниковых антенн.
- Актуаторов.
Автомобильные домкраты в качестве авто приводов
Для начала приобретите два реечных автомобильных домкрата. Основой их является винтовой узел из крепкого металла, который предназначен для выдерживания нагрузок при подъеме машины. Можем подсказать, что они часто валяются возле гаражей. Домкраты плохо переносят винтовые нагрузки, при сдвиге во время подъема машины домкрат приходит в негодность, и его выбрасывают.
Основой их является винтовой узел из крепкого металла, который предназначен для выдерживания нагрузок при подъеме машины. Можем подсказать, что они часто валяются возле гаражей. Домкраты плохо переносят винтовые нагрузки, при сдвиге во время подъема машины домкрат приходит в негодность, и его выбрасывают.
Реечные автомобильные домкраты
Составляя привод, к винту прикручиваете мотор с редуктором. Можно использовать моторы от старой стиральной машины, имеющие ремённую передачу. На рынке автозапчастей приобретаете гофру из резины для защиты винта от осадков.
Управление можно совершать радиокнопкой от какой-нибудь охранной сигнализации, которая функционирует по принципу: одно нажатие — реле сработало, ещё раз нажал — реле выключилось. Реле будет служить управлением моторами из блока управления стиральной машинкой, а концевики подберёте сами. Выглядит такое оборудование не очень эстетично, поэтому можно попробовать другой вариант самодельного привода.
Рулевые рейки от автомобиля
Более аккуратно и красиво выглядит привод, собранный из бывших в употреблении автозапчастей. Для тех, кто знает устройство современных автомобилей, известно, что в устройстве машины имеются так называемые рулевые рейки, которые отлично подойдут для распахивания панелей ворот, потому что принцип их работы аналогичен механизму, продаваемому промышленностью.
Для тех, кто знает устройство современных автомобилей, известно, что в устройстве машины имеются так называемые рулевые рейки, которые отлично подойдут для распахивания панелей ворот, потому что принцип их работы аналогичен механизму, продаваемому промышленностью.
Автомобильная рулевая рейка
В работе автомобиля есть такое понятие, как «люфт» рулевого колеса, когда он становится больше нормы, то рулевую рейку меняют. В принципе ее можно починить, однако на восстановление уйдёт много времени и труда. При сервисном обслуживании их просто меняют на новые.
Рядом с частными гаражами или возле не больших автосервисов на мини свалках при необходимости можно найти такие рейки от «Жигулей». Рейки обычно выбрасываются с рулевыми тягами, для знатоков понятно, что вам в руки попадает готовый механизм трапеции с готовым редуктором в рейке. Остаётся только пристроить мотор и управление.
Поворотный механизм от спутниковой антенны
Автоматику для ворот собрать вполне возможно и самому. Когда задуманная работа будет завершена, то Вы удостоверитесь, что ничего особенно сложного в создании простейшей автоматики нет. Особенно, если воспользоваться поворотным механизмом от спутниковой антенны с червячной передачей, которая работает, как линейный привод на двустворных воротах.
Когда задуманная работа будет завершена, то Вы удостоверитесь, что ничего особенно сложного в создании простейшей автоматики нет. Особенно, если воспользоваться поворотным механизмом от спутниковой антенны с червячной передачей, которая работает, как линейный привод на двустворных воротах.
При этом есть даже преимущество, которое заключается в том, что стандартный воротный электропривод работает от напряжения в 220 В, а к двигателю в устройстве спутниковой антенны постоянное напряжение в 36 В подаётся через понижающий трансформатор. Это гораздо лучше в плане безопасности.
Поворотный механизм от спутниковой антенны
Для увеличения скорости распахивания воротных панелей напряжение увеличивают на 2 В. При работе без большой нагрузки, такое повышение подаваемого напряжения не приведёт к отрицательным последствиям, но в какой-то мере ускорится износ мотора.
Вам понадобится, разумеется, два привода, причем выбирайте самые длинные штоки. Приобрести и их можно, если повезёт, в фирмах, продающих эти антенны. Цены на устройство колеблются от 35 до 50 долларов США, кроме того, будет необходим трансформатор и пульт.
Цены на устройство колеблются от 35 до 50 долларов США, кроме того, будет необходим трансформатор и пульт.
Пульт и парочку брелоков ДУ, зона действия которых около 50 м, можно купить в любой компании, коротая занимается установкой и обслуживанием охранных сигнализаций. Эта покупка будет стоить 30 — 40 долларов. Пульт должен выполнять две команды. Одна команда приводит в движение воротные панели в ту или иную сторону, а вторая команда, по желанию владельца, может включать и отключать освещение.
Брелоки дистанционного управления
Такую систему автоматики для двустворных ворот своими руками можно выполнить достаточно быстро, если подготовить к монтажу все материалы и устройства. Однако потребуется некоторая доработка в токовом реле. В том случае, если перед створками ворот возникает препятствие их движению, реле срабатывает и возвращает их в исходное положение.
Стоит помнить — без автоматического возвращения створок к исходному положению, мотор, продолжающий работать, может погнуть ворота, а сам перегреется и выйдет из строя.
Токовое реле
Промышленные приводы для автоматики ворот стоят для многих людей дорого. Конструкция привода, предложенного выше, позволяет значительно сократить расходы на автоматику. Автор предлагаемой конструкции пользуется воротами уже три года без замены элементов автоматики.
Актуаторы с якорными моторами
Изготовить привод для двустворных ворот собственными руками, и при этом сэкономить средства, можно приобретя и установив два одинаковых актуатора с якорными моторами. Меняя полярность, можно получить реверс, и угол распахивания может достигнуть 180°. При этом часто возникает проблема с синхронизацией перемещения створок.
Когда привод для распашных ворот сделан своими руками, он не имеет датчиков, и подключен к двигателю напрямую, в результате получается, что створки работают не синхронно.
Актуатор
Устранить это явление довольно трудно. Даже добившись синхронности движения воротных панелей, может случиться, так что в снежную и ветреную погоду они будут сбиваться с настройки из-за появления на пути движения одной из них сугроба. От этого можно избавиться, если на обе панели установить по полноценному активатору, то есть установить на каждой створке по полноценному приводу для распахивания ворот. Это приведёт к тому, что даже двигаясь с разными скоростями, створки все равно завершат движение, и сомкнутся, что от них и требуется.
От этого можно избавиться, если на обе панели установить по полноценному активатору, то есть установить на каждой створке по полноценному приводу для распахивания ворот. Это приведёт к тому, что даже двигаясь с разными скоростями, створки все равно завершат движение, и сомкнутся, что от них и требуется.
При установке самодельных приводов для распашных ворот можно встретиться с множеством различных проблем, особенно, если нет специальных знаний по специфике монтажа таких устройств. Задумывая такое дело, следует вооружиться знаниями и просмотреть несколько роликов, где умельцы делятся личным опытом.
Осуществляя монтаж приводов на воротных створках, можно во всей полноте оценить преимущество купленной автоматики, которое заключается в том, что к ней прилагается инструкция с подробным описанием работы, пошаговой схемой монтажа оборудования, описание специфики эксплуатации и особенностей технического обслуживания. Однако и Вы после установки привода собственной конструкции будете знать всё досконально, и сможете написать собственную инструкцию.
Автоматика для ворот, актуатор
Источник: http://rusograda.ru/vorota/avtomaticheskie-raspashnye-vorota-svoimi-rukami
Как сделать линейный привод своими руками
Для управления различными агрегатами в игрушечных машинах необходим линейный исполнительный механизм (привод, актуатор). К примеру, чтобы управлять стрелой ковша на экскаваторе, нужно некое подобие гидравлического цилиндра, работающего от низковольтного напряжения.
Сделать такой линейный привод, к тому же очень быстрый и шустрый, можно из старого компьютерного, двух с половиной дюймового дисковода. Там имеется червячная передача с широким шагом резьбы.
Понадобится
Изготовление привода из мотор-редуктора и старого дисковода
Демонтируем шаговый двигатель с червячной передачей из дисковода.
Вынимаем сам червяк и при необходимости, если не нужен большой вылет, обрезаем его.
Далее по размеру червяка с запасом обрезаем латунную трубку. В одном конце делаем боковое отверстие 0,6 мм в диаметре.
Запрессовываем трубку на вал мотор-редуктора. Сделать это очень просто, так как одно очень хорошо подходит к другому.
В бокове отверстие вставляем штифт. Это может быть любой контакт от радиодетали.
Он обязательно должен попасть в паз червяка. Затем соединение фиксируется пайкой.
В последствии обрезается кусачками и шлифуется до гладной поверхности.
Исполнительный механизм готов. Не лишним будет его смазать густой смазкой перед применением.
Через редуктор вращение передается на трубку, которая крутится. Червяк закреплен неподвижно. Во время вращения клин идет по пазу червяка в результате образуется поступательная сила и шток выдвигается. Если сменить полярность двигателя, то шток пойдет назад.
Работает актуатор очень надежно и быстро, в чем можете убедиться в коротком видео ниже.
Смотрите видео
Как сделать телевизор с подъемным механизмом — https://sdelaysam-svoimirukami.ru/3681-televizor-s-podemnym-mehanizmom.html
Автоматика для распашных ворот: самодельные и промышленные приводы
Компания «Русская Ограда». Мы занимаемся установкой заборов, ворот (в том числе автоматических), установкой столбов и линий ЛЭП по всей Москве и Московской области. Звоните: +7 (495) 762-97-99 c 09:00 до 21:00 ежедневно.
Распашные ворота, кажется, существовали всегда, как египетские пирамиды. Механические приводы для открывания тяжелых и прочных крепостных ворот существовали и в те далёкие времена. В настоящее время существует автоматика для распашных ворот, используются приводы трёх видов, и всё это работает на электричестве в качестве движущей силы.
- Линейная.
- Рычажная.
- Подземная.
Типы приводов
Теперь автоматика для ворот является оборудованием, обеспечивающим безопасность манёвров в проёме ворот, и при необходимости может подавать сигналы проникновения на территорию посторонних лиц, кроме того, служить автоматической системой пропуска посетителей и владельцев, проживающих на этой территории.
Линейная автоматика для распахивающихся створ
Линейный привод промышленного образца
В комплект автоматики линейного типа для распашных ворот входят:
- Линейные приводы -2шт.
- Блок управления.
- Лампа сигнальная.
- Приемник со встроенной антенной.
- Пульт ДУ-2шт.
- Фотоэлементы.
Некоторые линейные приводы имеют ходовую бронзовую гайку, что является значительным преимуществом перед другими вариантами подобных приводов, так как обеспечивают более длительную эксплуатацию. К преимуществам того или иного производителя относятся:
К преимуществам того или иного производителя относятся:
- Корпус из высокопрочного, алюминиевого сплава, обладающего антикоррозионными свойствами.
- Усиленный кронштейн для крепления привода.
- Обеспечение замедления хода створок при подходе к концевым положениям.
- Концевые встроенные выключатели.
- Механические встроенные упоры.
- Цифровой дисплей, встроенный в блок управления, и предназначенный для программирования функций привода.
- Возможность в случае проблем с электропитанием быстро перейти на ручное управление.
Линейный вариант самодельного привода
В последнее время стали часто использовать так называемые актуаторы, которые преобразуют вращение вала электродвигателя в возвратно-поступательное. К тому же актуаторы заметно увеличивают силу тяги, потому что являются в некотором роде понижающими редукторами.
Актуатор
Простейшим актуатором является обычный винтовой домкрат. Вращательное движение его винта преобразуется в линейный подъём вверх опорной площадки домкрата. Этот принцип используется в большинстве линейных актуаторов. Это примечание сделано для тех, кто собирается собрать собственную конструкцию линейного привода для распахивания ворот.
Этот принцип используется в большинстве линейных актуаторов. Это примечание сделано для тех, кто собирается собрать собственную конструкцию линейного привода для распахивания ворот.
Блок управления
Главной задачей блока управления является выполнение трёх основных команд:
- Пуск, то есть прямое движение.
- Пуск, движение обратное первому, называется реверсивным.
- Стоп, прекращение движения в любом направлении.
Выпущенное промышленностью автоматическое управление движением створок и система ДУ пока что стоят дороговато, многие умельцы считают, что цена необоснованна, так как не требует больших затрат на изготовление. Сделать такую систему ДУ вполне возможно и самостоятельно.
Такая автоматика для распашных ворот своими руками создаётся из простых деталей, созданных на логических элементах, и собрать её под силу самостоятельно по предлагаемой ниже схеме.
Электросхема управления работой створ
Надёжность работы этого блока управления испытана двадцатилетней работой на воротах её автора. В этой схеме электроника чрезвычайно простая по сравнению с механизмом конструкции.
В этой схеме электроника чрезвычайно простая по сравнению с механизмом конструкции.
Эта схема работает от однократного нажимания на кнопки S-1и S-3 START, поочерёдно для отпирания или запирания ворот. Герконы, установленные в нужных местах, обеспечивают окончание движения створа. Кнопка S-2 STOP принудительно прекратит движение ворот в любом месте.
Эта схема закрывает ворота на механический засов. Геркон G1 работает в режимах: засов закрыт – управление отключено, открыт — управление подключено.
Работа платы основывается на схемах D1, D2, D3, D4 и реле Р1, Р2, Р3.
Общая схема выполняет следующие функции:
- При однократном нажатии кнопки-ПУСК (1 сек.) уходит команда на полное открытие створок.
- Повторное однократное нажатие кнопки-Пуск идёт сигнал на полное закрытие створок.
- Кнопка-СТОП прекращает выполнение предыдущих команд, происходит полная остановка.
- В первой крайней точке происходит прекращение выполнения полученной команды, срабатывают герконы G4, G5, после этого не возможно её выполнение при ошибочном или случайном повторном нажатии кнопки, но при этом остаётся возможность прохождения команды с реверсной кнопки, до той поры, пока створ не достигнет второй крайней точки.
 После этого все меняется наоборот, срабатывают герконы G2, G3.
После этого все меняется наоборот, срабатывают герконы G2, G3. - В этом пункте происходят электрическое и механическое действия. В случае, если во время движения створ в проеме возникает какое-то препятствие, то механизм будет передвигать створы до определенного порога усилия, после этого происходит остановка движения.
- При механическом закрытии ворот на засов, не проходит команда на запуск электродвигателя. Этому препятствует геркон G1. В тоже время команду «Стоп» геркон G1 не блокирует.
- Легкость параллельного подключения дополнительных пультов, это может быть блок дистанционного пульта сигнализации от скутера в комплекте с парой брелоков ДУ.
- При включении сети после пропадания напряжения схема не сохраняет последних команд.
- Сигнальная лампа подаёт сигнал о внезапной подаче электропитания на исполнительный электродвигатель, кроме того, освещает территорию в темное время и предупреждает о том, что створы движутся.
- Движение створки, а также время действия двигателя ограничивается переменными резисторами R-1, R-2 и микросхемами D1, D2. Время устанавливается таймерам, рационально установить 40 секунд.
 После этого все меняется наоборот, срабатывают герконы G2, G3.
После этого все меняется наоборот, срабатывают герконы G2, G3. Время устанавливается таймерам, рационально установить 40 секунд.
Время устанавливается таймерам, рационально установить 40 секунд.Предложенная схема предназначена для ворот распахивающихся вовнутрь территории.
Рычажный вариант привода своими руками
Рычажный электропривод отличается от линейного тем, что работает без промедления действия. Привод обеспечивает плавность хода створок, потому что в конструкции механизма заложена плавность этих движений. При этом створки способны открываться под углом от 90 до 110°, как на улицу, так и внутрь территории.
Стандартный комплект рычажного привода
Состоит рычажный привод из электромотора с редуктором. Рабочая часть привода закрепляется на неподвижной части ворот. Двигающий рычаг устанавливается на створе ворот. Модернизированный рычажный механизм используется для подземной установки. Они встраиваются в проезжую часть воротного проёма, очень близко с осью петель створа. Принцип действия рычажного привода бывает электромеханическим и гидравлическим.
Рычажные приводы, как правило, имеют небольшие габариты. Рычажные приводы выпускают наружного направления движения створ, при этом они открываются на угол более 90°, или внутреннего, когда ворота распахиваются на угол до 125°. В связи с их такой особенностью, двигатели устанавливают в труднодоступные места и на калитки, стоящие отдельно.
Рычажные приводы выпускают наружного направления движения створ, при этом они открываются на угол более 90°, или внутреннего, когда ворота распахиваются на угол до 125°. В связи с их такой особенностью, двигатели устанавливают в труднодоступные места и на калитки, стоящие отдельно.
Внимание! Рычажные приводы используют в случаях, когда нет технологической возможности установить линейный привод.
Рычажный механизм не стопорит ворота в конечных положениях, поэтому требуется установка дополнительных механических ограничителей. Автоматика даёт возможность регулирования скорости открывания и запирания ворот. Есть возможность подсоединения платы управления резервным питанием. Механизм обладает хорошей защитой от влаги и различных внешних воздействий. Рычажные двигатели стоят дороже линейных приводов.
Автоматические ворота своими руками
Практика применения актуаторов LAM3
Сегодня на рынке представлены самые различные актуаторы. Под каждый конкретный случай можно найти актуатор
с
необходимым усилием, скоростью движения штока, длиной хода и даже с законченным интерфейсом управления.
Спектр
применения актуаторов достаточно широк. В большинстве случаев актуаторы (приводы линейного перемещения)
применяются
как составные части: механизмов
управления шторками, люками, крышами, дверями и т.п. Кроме того, актуаторы применяются для перемещения
видеокамер в
системах видеонаблюдения, в различном технологическом и индустриальном оборудовании.
В этой статье автор делится опытом применения и эксплуатации актуаторов типа LAM3. На
рынке
представлены актуаторы LAM3 со следующей длиной хода штока L3, мм: 50, 100, 150, 200, 250 и 300. Пример
обозначения
при заказе актуатора с напряжением питания двигателя 24В, длиной хода штока 200 мм и усилием 750Н:
LAM3-S3-200-ROE-DC24V.
Под каждый конкретный случай можно найти актуатор
с
необходимым усилием, скоростью движения штока, длиной хода и даже с законченным интерфейсом управления.
Спектр
применения актуаторов достаточно широк. В большинстве случаев актуаторы (приводы линейного перемещения)
применяются
как составные части: механизмов
управления шторками, люками, крышами, дверями и т.п. Кроме того, актуаторы применяются для перемещения
видеокамер в
системах видеонаблюдения, в различном технологическом и индустриальном оборудовании.
В этой статье автор делится опытом применения и эксплуатации актуаторов типа LAM3. На
рынке
представлены актуаторы LAM3 со следующей длиной хода штока L3, мм: 50, 100, 150, 200, 250 и 300. Пример
обозначения
при заказе актуатора с напряжением питания двигателя 24В, длиной хода штока 200 мм и усилием 750Н:
LAM3-S3-200-ROE-DC24V.
Основные элементы актуатора:
- двигатель постоянного тока;
- редуктор;
- винт.
Они интегрированы в единый механизм компактных размеров для совершения линейных перемещений. Актуаторы имеют функцию самоблокировки. Основные технические характеристики актуаторов серии LAM3 приведены в табл.1.
Назад| Тип актуатора | LAM3‑SO | LAM3‑S1 | LAM3‑S2 | LAM3‑S3 |
|---|---|---|---|---|
| Напряжение питания двигателя, B | 24 | |||
| Усилие, H | 120 | 240 | 500 | 750 |
| Максимальная длина хода, мм | 300 | |||
| Скорость движения, мм/с | 45-57 | 22-30 | 12-17 | 8-10 |
| Номинальный ток, А | 2.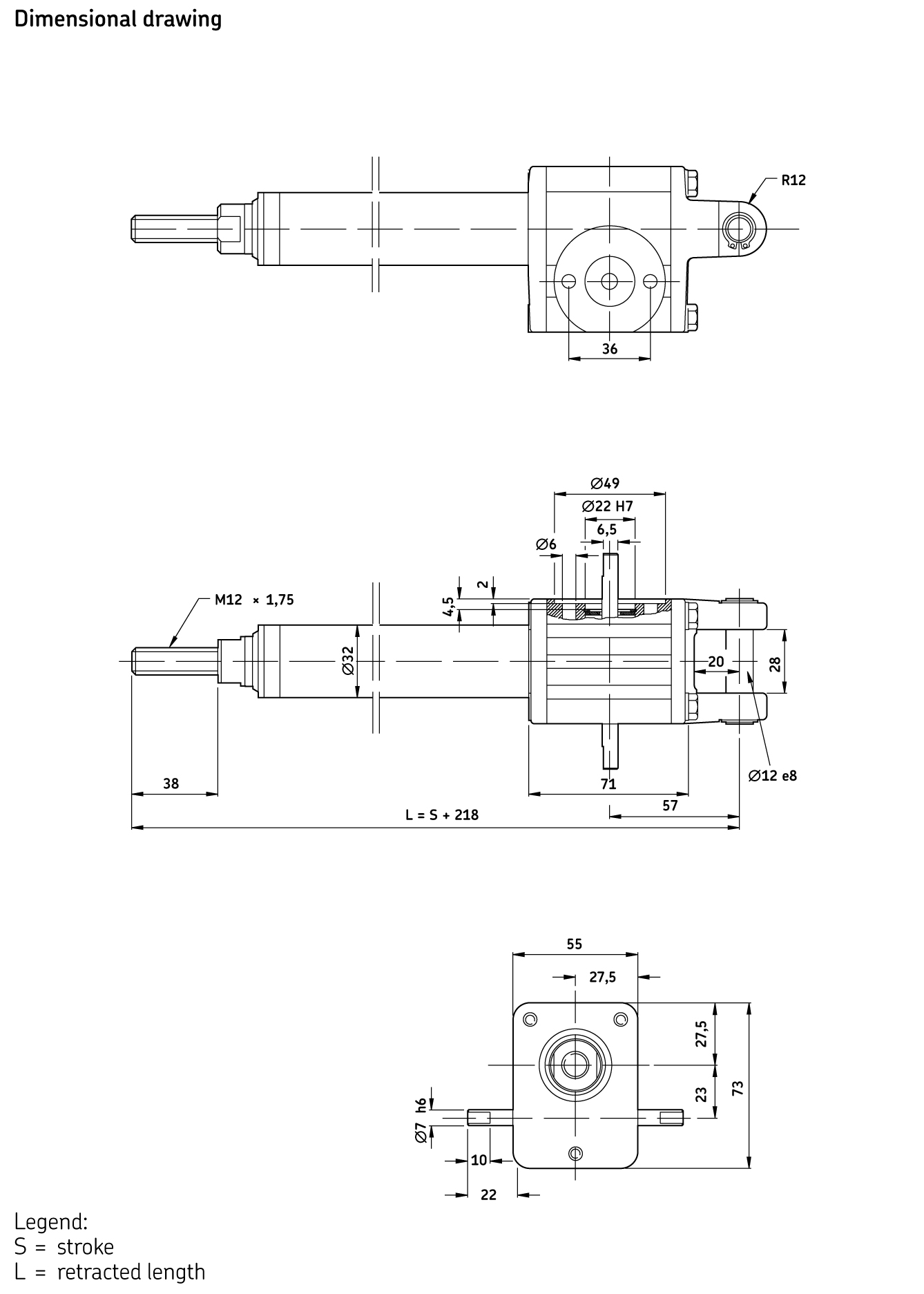 2 2 | 1.9 | 1.8 | 1.8 |
| Температура окружающей среды, °С | -15…+60 | |||
| Класс защиты | IP65 | |||
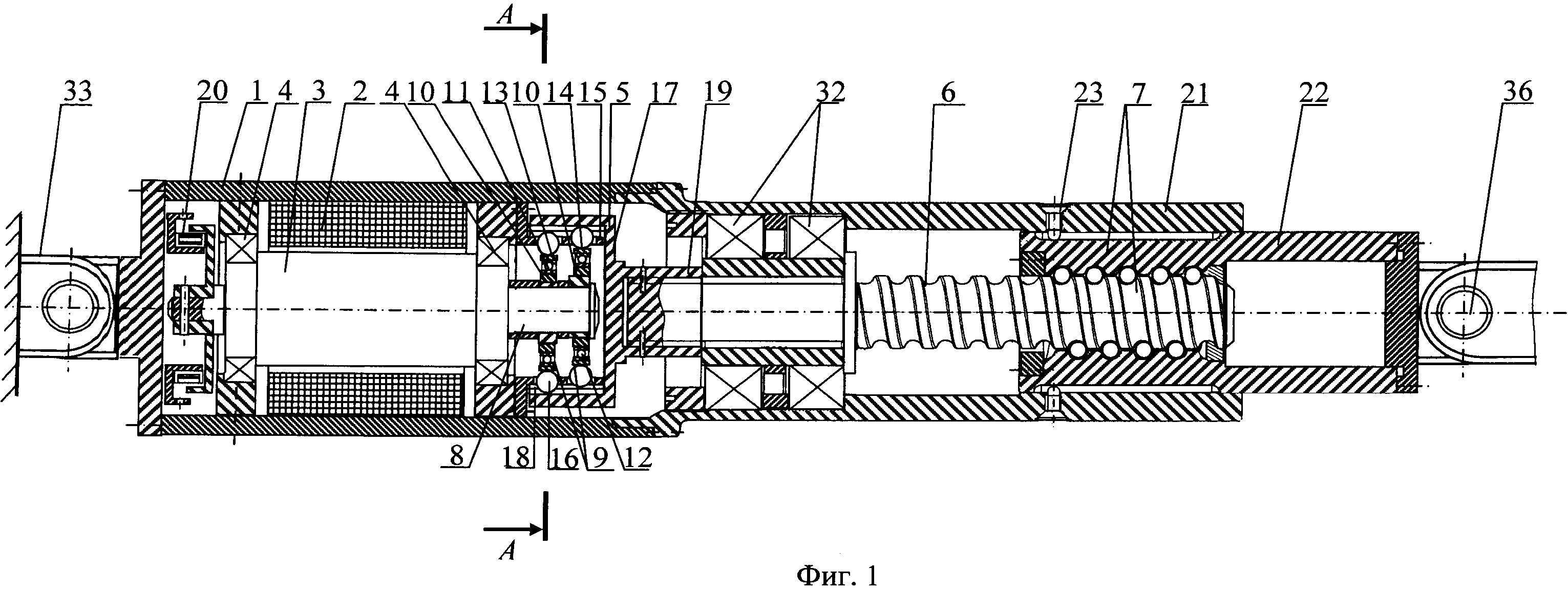
Работа актуатора
Актуатор работает следующим образом. Пусть шток актуатора находится в среднем положении. Концевые выключатели SA1, SA2 замыкают соответственно диоды VD1, VD2 (рис.1).
Рис.1
Меняя полярность подаваемого напряжения на электродвигатель М1, можно перемещать шток актуатора в крайне
левое или
соответственно в крайне правое положение. При вертикальном расположении – в крайнее верхнее положение или в
крайнее
нижнее положение.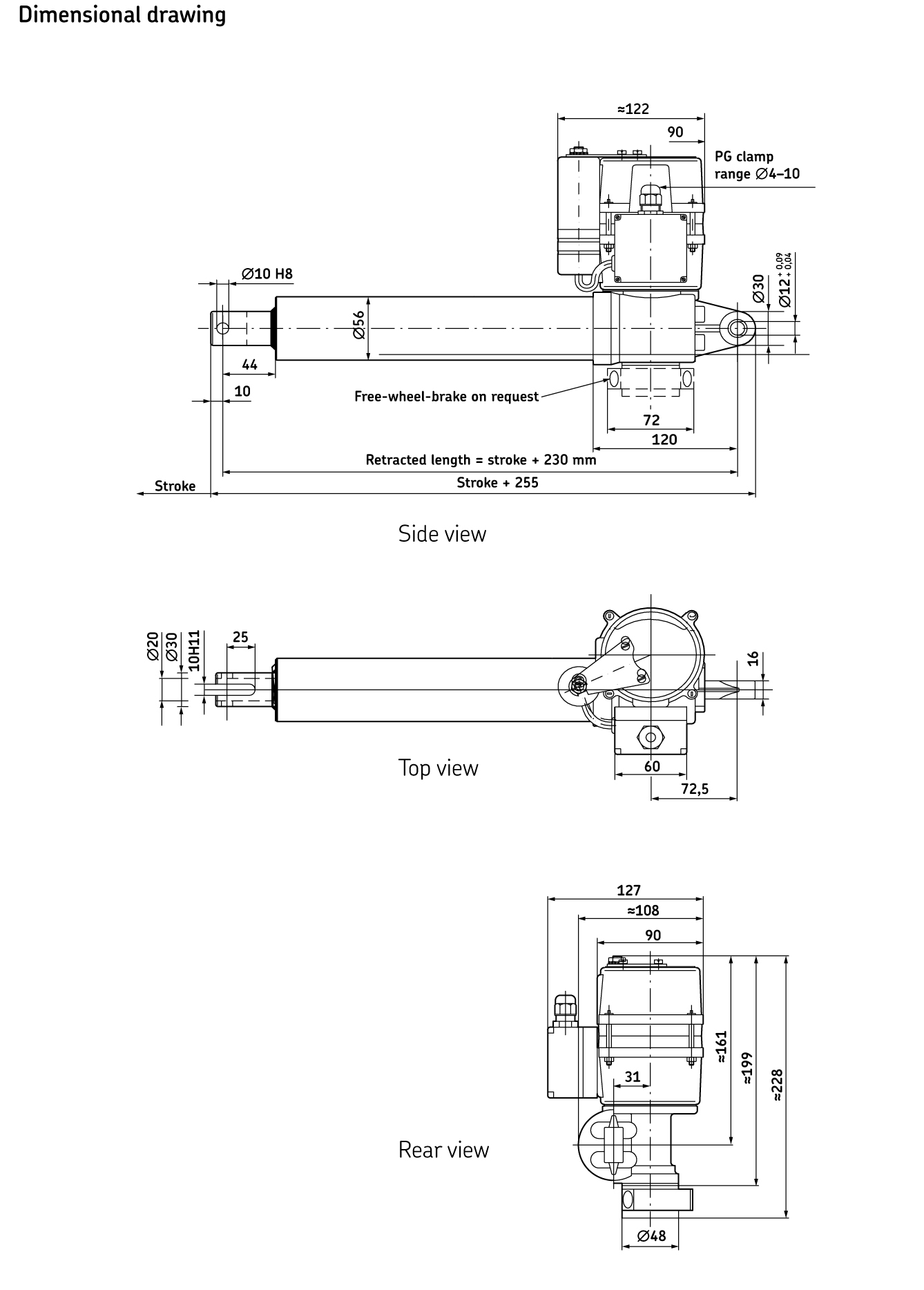 Как только шток дойдет до крайнего положения, толкатель нажмет на кнопку концевого
выключателя,
выходные контакты которого размыкаются. Тем самым, включая в цепь управления двигателя диод, который
блокирует работу
двигателя. Для того чтобы шток пошел в обратном направлении (в другое крайнее положение) необходимо изменить
полярность напряжения, подаваемого на электродвигатель актуатора. В целом актуатор представляет собой
достаточно
простое устройство.
Как только шток дойдет до крайнего положения, толкатель нажмет на кнопку концевого
выключателя,
выходные контакты которого размыкаются. Тем самым, включая в цепь управления двигателя диод, который
блокирует работу
двигателя. Для того чтобы шток пошел в обратном направлении (в другое крайнее положение) необходимо изменить
полярность напряжения, подаваемого на электродвигатель актуатора. В целом актуатор представляет собой
достаточно
простое устройство.
Система управления люком
Упрощенная схема управления механизмом открывания люка, где задействован актуатор, показана на рис.2.
В данном случае актуатор используется только для закрытия/открытия люка без промежуточных положений, т.е.
люк имеет
два положения: закрыт и открыт. Под каждый конкретный механизм подбирается актуатор с необходимой длиной
выхода штока,
усилием и скоростью движения.
Рассмотрим поподробнее схему управления. Схема управления представляет собой функционально законченное устройство и выполнена на базе электромагнитных пускателей КМ1 и КМ2. Схема позволяет реализовать два режима работы: ручной и дистанционный. Основные элементы схемы: электромагнитные пускатели КМ1, КМ2; реле KL1, KL2; концевые выключатели S1, S2; кнопки SB1–SB3.
В ручном режиме управление осуществляют кнопками SB2 «Открыть» и SB3 «Закрыть». Предусмотрена кнопка SB1 –
аварийный
стоп. Если схемой управления управляют дистанционно – сигналы управления поступают на соединитель Х1 с
автоматизированного рабочего места оператора или блока управления комплекса (изделия). Целесообразно
гальванически
развязать схему управления от остальной схемы комплекса (изделия). Контакты KL1.1 реле KL1 включают
сигнальную лампу
HL1, контакты KL1. 2 данного реле выполняют функцию датчика положения «Люк открыт». Соответственно контакты
KL2.1 реле
KL2 включают сигнальную лампу HL2, контакты KL2.2 данного реле выполняют функцию датчика положения «Люк
закрыт».
2 данного реле выполняют функцию датчика положения «Люк открыт». Соответственно контакты
KL2.1 реле
KL2 включают сигнальную лампу HL2, контакты KL2.2 данного реле выполняют функцию датчика положения «Люк
закрыт».
Рассмотрим подробнее работу схемы управления. Питающее напряжение поступает на схему через автоматический выключатель QF1. Допустим, что люк закрыт, тогда группа контактов S2.1 концевого выключателя S2 разомкнута, S2.2 замкнута. Реле KL2 включено Лампа HL2 «Закрыто» светит. Реле KL1 обесточено, и лампа HL1 «Открыто» не светится. Шток актуатора максимально задвинут внутрь.
После нажатия кнопки SB2 (или по команде «Люки открыть»), питающее напряжение подается на катушку
контактора КМ1.
Данный контактор включается. Группы контактов КК1.1–КК1.3 замыкаются, КК1.4 размыкаются.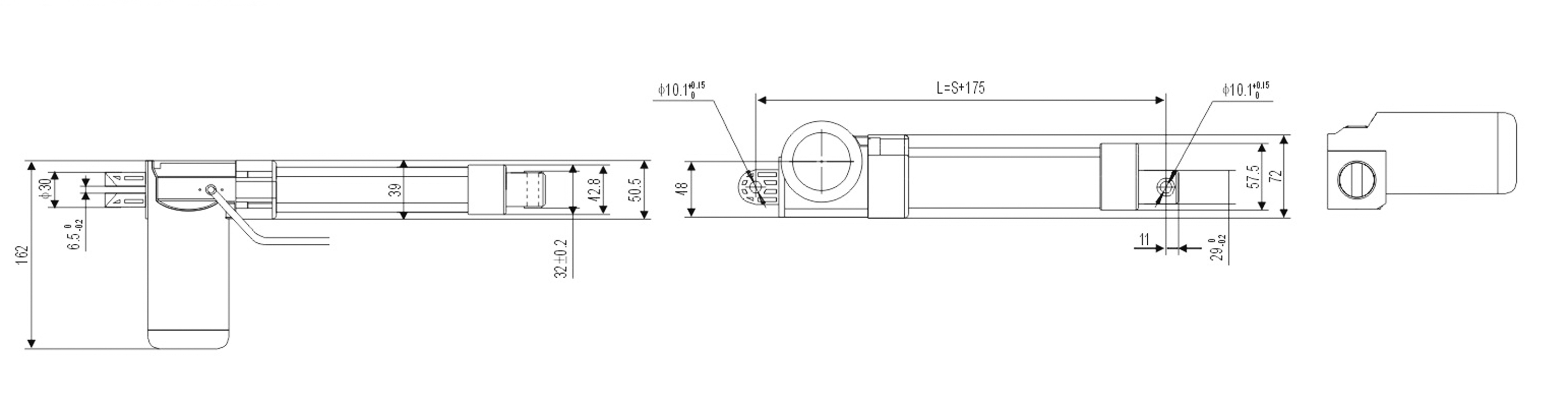 Разомкнутые
контакты КК1.4
предотвращают срабатывание КМ2, т.е. несанкционированное закрытие люка после его открывания. Входное
напряжение +24В
через замкнутые КК1.1, КК1.2 поступает на электродвигатель М1 актуатора. Группа КК1.3 замыкает кнопку SB2.
Теперь
команду «Люки открыть» можно снять.
Разомкнутые
контакты КК1.4
предотвращают срабатывание КМ2, т.е. несанкционированное закрытие люка после его открывания. Входное
напряжение +24В
через замкнутые КК1.1, КК1.2 поступает на электродвигатель М1 актуатора. Группа КК1.3 замыкает кнопку SB2.
Теперь
команду «Люки открыть» можно снять.
Электродвигатель М1 работает, вал вращается, шток актуатора выдвигается – люк открывается. Контакты S2.2
концевого
выключателя S2 размыкаются, контакты S2.1 замыкаются. Реле KL2 обесточивается и выключается. Лампа HL2
гаснет. Как
только люк полностью откроется (встанет в положение «Открыто»), группа контактов S1.1 размыкается, группа
контактов
S1.2 замыкается. Катушка контактора КМ1 обесточивается, контактор выключается. Контакты КК1.1–КК1.3
размыкаются, КК1.4
замыкаются. Двигатель М1 актуатора обесточивается. Реле KL1 включается. Лампа HL1 загорается.
Реле KL1 включается. Лампа HL1 загорается.
Следует отметить, что шток актуатора должен иметь некоторый запас на выдвижение, прежде чем люк полностью откроется, т.е. чтобы люк открывался и закрывался до крайних положений, концевые выключатели в схеме управления должны срабатывать раньше, чем концевые выключатели в самом актуаторе.
Если люк закрывается на замок, то во избежание выхода из строя актуатора при открывании люка, целесообразно сделать «защиту от дурака». Например, установив концевой выключатель, который будет отключать питающее напряжение схемы управления или блокировать сигналы управления, при закрытом замке.
Конструктивно все элементы схемы управления целесообразно разместить в одном щите, обеспечив хороший доступ
к ним.
Элементы управления (кнопки, лампочки) следует разместить на передней панели щита или двери. Для того чтобы
экстренно
остановить открывающийся (закрывающийся) люк, необходимо нажать кнопку SB3 «Аварийный стоп».
Для того чтобы
экстренно
остановить открывающийся (закрывающийся) люк, необходимо нажать кнопку SB3 «Аварийный стоп».
Детали
В схеме управления применены электромагнитные пускатели типа ПМЛ1161. Подойдут совершенно любые,
аналогичные других
серий с рабочим напряжением катушки 24В и с рабочим током контактов, не меньше номинального тока
электродвигателя
актуатора. Номинальный коммутируемый рабочий ток вышеуказанного пускателя до 10 А. В качестве концевых
выключателей
S1, S2 можно применить влагозащищенный выключатель путевой типа ВПК2111. Данный концевой выключатель
довольно тяжелый
и громоздкий, но надежный. Реле KL1, KL2 типа РЭС52 исполнения РС4.555.020 ЯЛО.455.012ТУ. Кнопка SB1 типа
D16LAS11abKR, кнопка SB2 типа D16LAR11abKG, кнопка SB3 типа D16LAR11abKR. Лампа h2 типа D16PLR1000CG
зеленого цвета,
лампа h3 типа D16PLR1000CR красного цвета. Соединитель Х1 типа 2РМТ24Б19Г1В1В. Учитывая, что максимальный
ток
коммутации пускателя ПМЛ1161 составляет 10А, а номинальный ток актуатора LAM3-S0 – 2,2А, предлагаемой схемой
управления можно управлять четырьмя актуаторами, включенными параллельно, т.е. можно управлять четырьмя
люками
одновременно. При этом нужно учитывать, что концевые выключатели при применении представленной схемы
управления будут
фиксировать крайние положения только у одного люка.
Соединитель Х1 типа 2РМТ24Б19Г1В1В. Учитывая, что максимальный
ток
коммутации пускателя ПМЛ1161 составляет 10А, а номинальный ток актуатора LAM3-S0 – 2,2А, предлагаемой схемой
управления можно управлять четырьмя актуаторами, включенными параллельно, т.е. можно управлять четырьмя
люками
одновременно. При этом нужно учитывать, что концевые выключатели при применении представленной схемы
управления будут
фиксировать крайние положения только у одного люка.
Особенности актуаторов LAM3
В процессе эксплуатации актуаторов LAM3 были выявлены следующие особенности. Прежде всего, следует отметить
хорошую
ремонтопригодность актуаторов LAM3. Его можно легко разобрать и добраться до любой детали и переставить ее с
одного
актуатора на другой, т.е. можно из двух неисправных актуаторов собрать один работоспособный.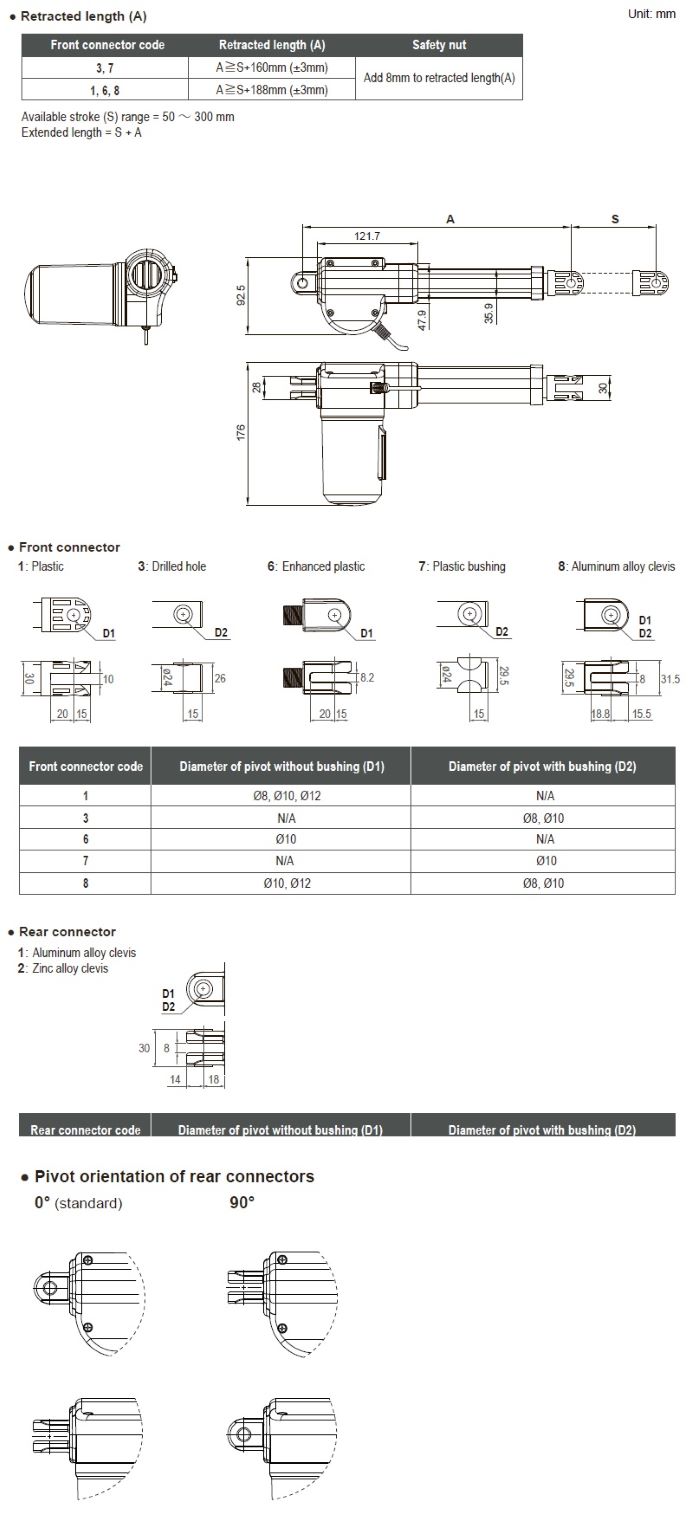
При значительных перегрузках, как правило, перегорает якорь электродвигателя, щетки электродвигателя, гораздо реже — диоды и концевые выключатели. Редуктор, винт, шток (механическая часть актуаторов) оставались всегда исправными. Труднее всего переставить направляющий винт, но при желании и наличии некоторых навыков слесарных работ это возможно. Вышеуказанную операцию лучше выполнять вдвоем.
При перестановке электродвигателя актуатора, главное – это не перепутать полярность постоянных
электромагнитов
(постоянные электромагниты вместе с корпусом представляют собой единую конструкцию). В корпусе
электродвигателя есть
малозаметная направляющая. Даже если в нее и не попасть и развернуть корпус на 180°, два длинных винта,
которые крепят
крышку корпуса и сам корпус к основанию, все равно можно закрутить.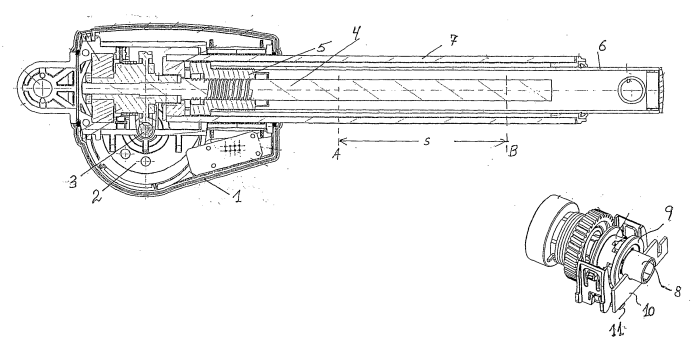 Но в итоге вал двигателя будет вращаться
в
противоположную сторону. Замена шестеренок редуктора, устройства блокировки (диодов с концевыми
выключателями), в
общем, не представляет труда. После перестановки двигателя целесообразно полностью собранный актуатор
подключить к
источнику питания 24В и «прогнать» как минимум два раза до крайних положений.
Но в итоге вал двигателя будет вращаться
в
противоположную сторону. Замена шестеренок редуктора, устройства блокировки (диодов с концевыми
выключателями), в
общем, не представляет труда. После перестановки двигателя целесообразно полностью собранный актуатор
подключить к
источнику питания 24В и «прогнать» как минимум два раза до крайних положений.
В целом, в процессе эксплуатации актуаторы LAM3 зарекомендовали себя как сравнительно недорогое, надежное и неприхотливое устройство, обладающее неплохой устойчивостью к механическим и климатическим воздействиям. Эксплуатация его зимой при температуре –25°С не вызвала никаких нареканий. Актуатор выдерживался на такой температуре неделями и все равно работал.
Сергей Шишкин, г. Саров, Нижегородской обл.
Международный электротехнический журнал «Электрик» 11, 2012
Актуатор, Linear Actuator, Линейный актуатор
Линейный привод (Linear Actuator, Линейный актуатор) — это комплекс устройств, предназначенных для поступательного линейного перемещения исполнительных органов рабочих систем.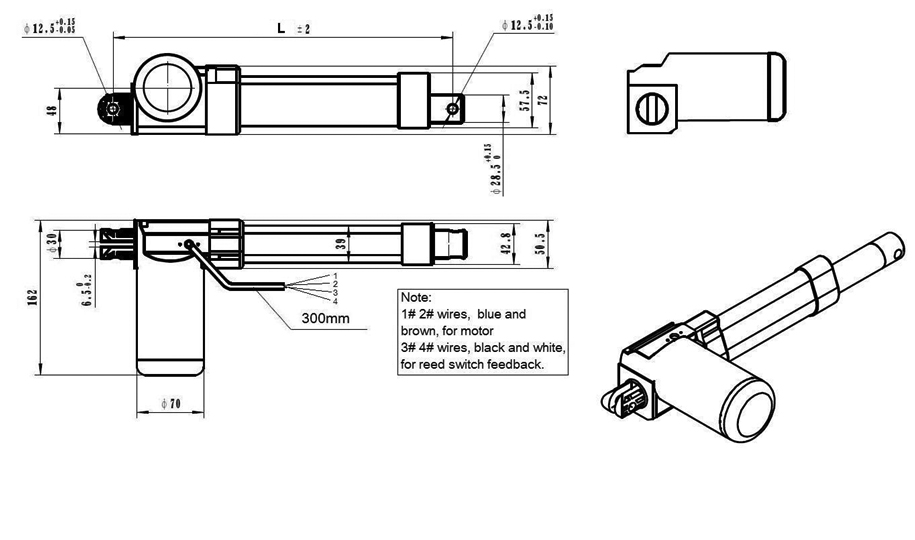
Он широко используется во многих отраслях промышленности. Одно из самых распространенных его применений — регулирование трубопроводной арматуры, например при передаче газа или нефти. В зависимости от вида используемой энергии различают:
- линейный пневмоэлектропривод (использует энергию сжатого воздуха),
- гидроэлектропривод (использует энергию давления жидкостей).
- электропривод.
Для преобразования энергии в механическую в электроприводах используются различные типы электродвигателей, в зависимости от потребностей производства- переменного или постоянного тока. Асинхронные однофазные двигатели переменного тока имеют мощность менее 0,5 кВт, трехфазные — большую мощность и способны обеспечить более быстрое перемещение. Также при необходимости могут быть использованы двигатели постоянного тока или серводвигатели. У линейного электропривода много достоинств, перед своими конкурентами, он гораздо дешевле в эксплуатации, и работает при любых погодных условиях (в отличии от гидропривода), не требует дополнительного оборудования для эксплуатации (в отличии от пневматики).
Линейные приводы производства компании «Сервомеханизмы», можно разделить на 2 группы, в зависимости от принципа крепления двигателя:
1. двигатель вращает винт винтовой передачи привода через червячный редуктор. Ось двигателя перпендикулярна оси механизма привода.
2. двигатель вращает винт передачи через зубчато-ременный редуктор. Ось двигателя параллельна оси механизма привода.
Обе группы изготавливаются в двух исполнениях:
-винтовая передача взаимодействует между собой по 1- и 2-х заходной трапециидальной резьбе.(винтовая пара)
-винтовая передача взаимодействует через шарико-винтовую передачу (шарико-винтовая пара)
Более понятно это отражено на схеме.
Механизм электропривода, как уже было сказано, комплектуется асинхронными 1 и 3 фазными электродвигателями, двигателями постоянного тока от 12 до 220В, так же более сложными устройствами — серводвигателями.
Просмотров: 6334 | Дата публикации: Понедельник, 13 мая 2013 08:41 |
Блог Helix | Линейные приводы своими руками
Мы все были там — вы увидели отличную идею и подумали: «Я могу это сделать».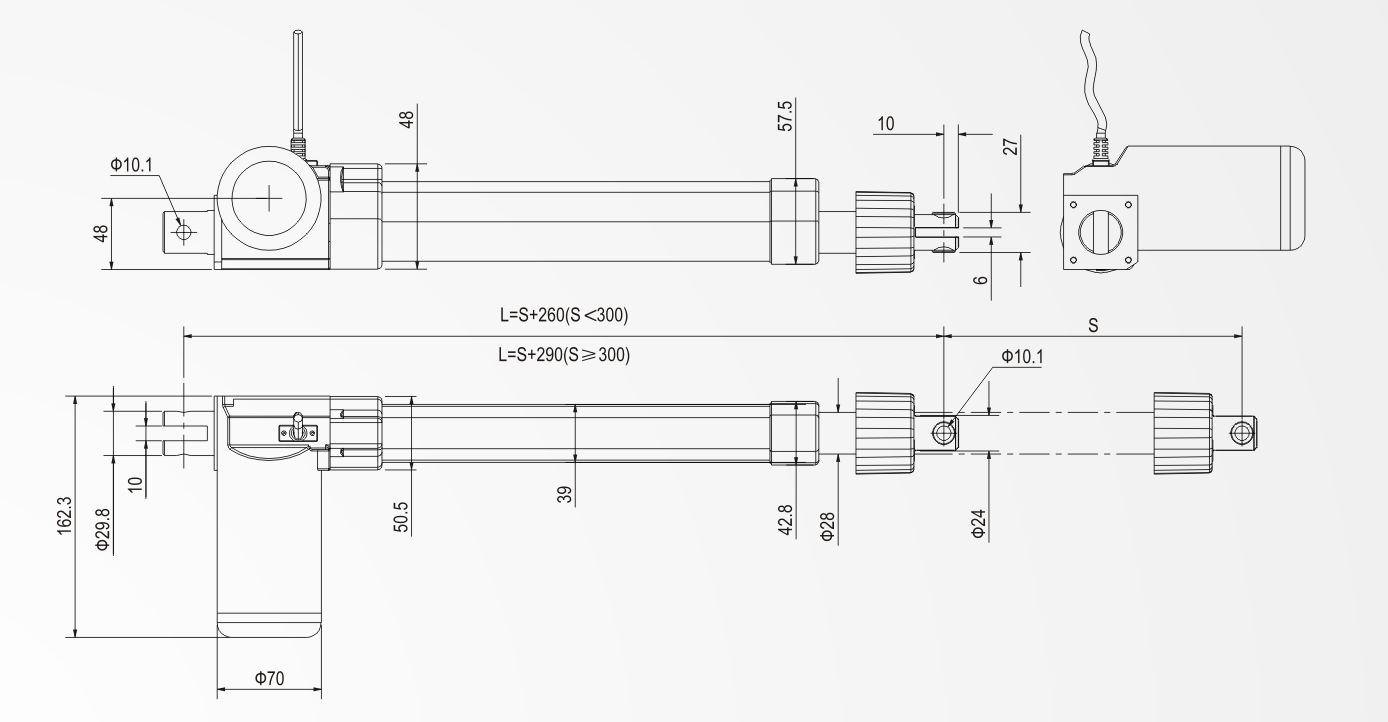 Будь то ремонт вашей машины, проект ландшафтного дизайна на заднем дворе или даже ремесленная идея для вашего дома, у всех нас был проект «сделай сам», который шел не так.
Будь то ремонт вашей машины, проект ландшафтного дизайна на заднем дворе или даже ремесленная идея для вашего дома, у всех нас был проект «сделай сам», который шел не так.
Мы все были там — вы увидели отличную идею и подумали: «Я могу это сделать». Будь то ремонт вашей машины, проект ландшафтного дизайна на заднем дворе или даже ремесленная идея для вашего дома, у всех нас был проект «сделай сам», который шел не так.Нет ничего плохого в том, чтобы попытаться реализовать проект самостоятельно, если это сработает.
То же самое и с линейным движением. Вы знаете основы этого, поэтому создание собственного линейного привода должно быть легким, верно?
Все можно найти в Интернете, поэтому вы начинаете заказывать у разных производителей. Все ваши детали в конце концов приходят по почте, и наступает время сборки. Через несколько часов у вас есть что-то похожее на то, что вы пытались построить, и начинаются вопросы.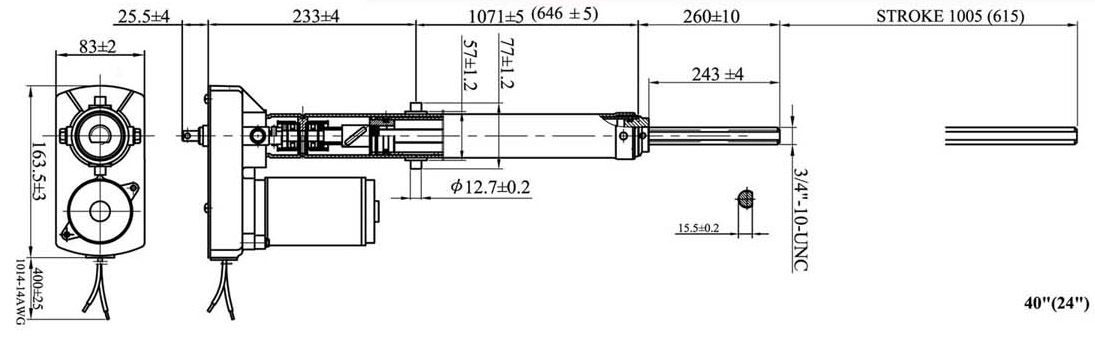
Зачем мне лишний кусок? Почему мой ходовой винт не вращается? Почему все это стоило так дорого? Почему я вообще пытался сделать это самостоятельно? Почему я не могу просто купить линейный привод, готовый к использованию?
У Helix Linear Technologies есть ответ для вас. Вместо того, чтобы проектировать, покупать компоненты и собирать, наши клиенты обнаруживают, что удобство и экономия затрат на разработку предварительно спроектированного, собранного, испытанного и готового к использованию привода Helix Linear для их приложений является наиболее экономичным и чувствительным к времени подходом к низкому энергопотреблению. автоматизация затрат.
Наши микропрецизионные линейные приводы являются строительными блоками для недорогой автоматизации. Каждый вариант включает прецизионный узел ходового винта, размещенный в прочном алюминиевом экструдированном корпусе.
- CPA (сопряженный прецизионный привод)
- IPA (встроенный прецизионный привод)
- SPA (простой прецизионный привод)
Helix использует шаговый двигатель, специально изготовленный в соответствии с их спецификациями, и доступен с различными конфигурациями обмотки.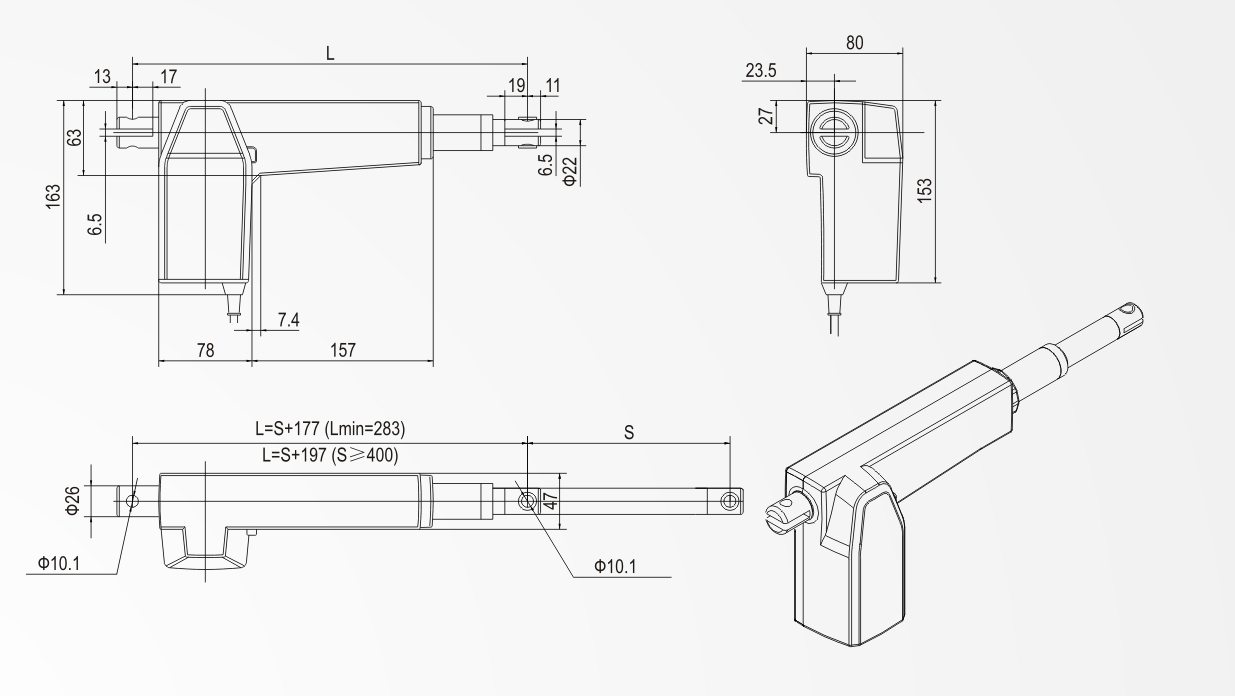 В двигателях установлены крупногабаритные радиальные шарикоподшипники с регулировочными прокладками для устранения люфта двигателя и обеспечения максимальной тяги. Три типоразмера двигателей с двойным блоком; NEMA 14, 17 и 23 являются стандартными вариантами каталога. Электропроводка двигателей может быть подключена, а разъемы добавлены в соответствии с чертежом заказчика.
В двигателях установлены крупногабаритные радиальные шарикоподшипники с регулировочными прокладками для устранения люфта двигателя и обеспечения максимальной тяги. Три типоразмера двигателей с двойным блоком; NEMA 14, 17 и 23 являются стандартными вариантами каталога. Электропроводка двигателей может быть подключена, а разъемы добавлены в соответствии с чертежом заказчика.
Приводы изготовлены из самонесущего прецизионного экструдированного алюминия и доступны с дополнительной направляющей выносных опор профильной рейки для повышения жесткости при моментных или смещенных нагрузках.Встроенные Т-образные пазы обеспечивают удобную поддержку и простой и экономичный монтаж аксессуаров, таких как монтажные кронштейны, концевые выключатели и кабельные держатели.
Гладкость обеспечивается прецизионно катаным ходовым винтом с покрытием из ПТФЭ, установленным на двигателе, который на заводе соответствует ходовой гайке Helix. Свинцовые гайки изготавливаются методом литья под давлением из запатентованной специальной смеси полимеров, обеспечивающей многолетний срок службы и исключительную плавность работы в самых сложных условиях.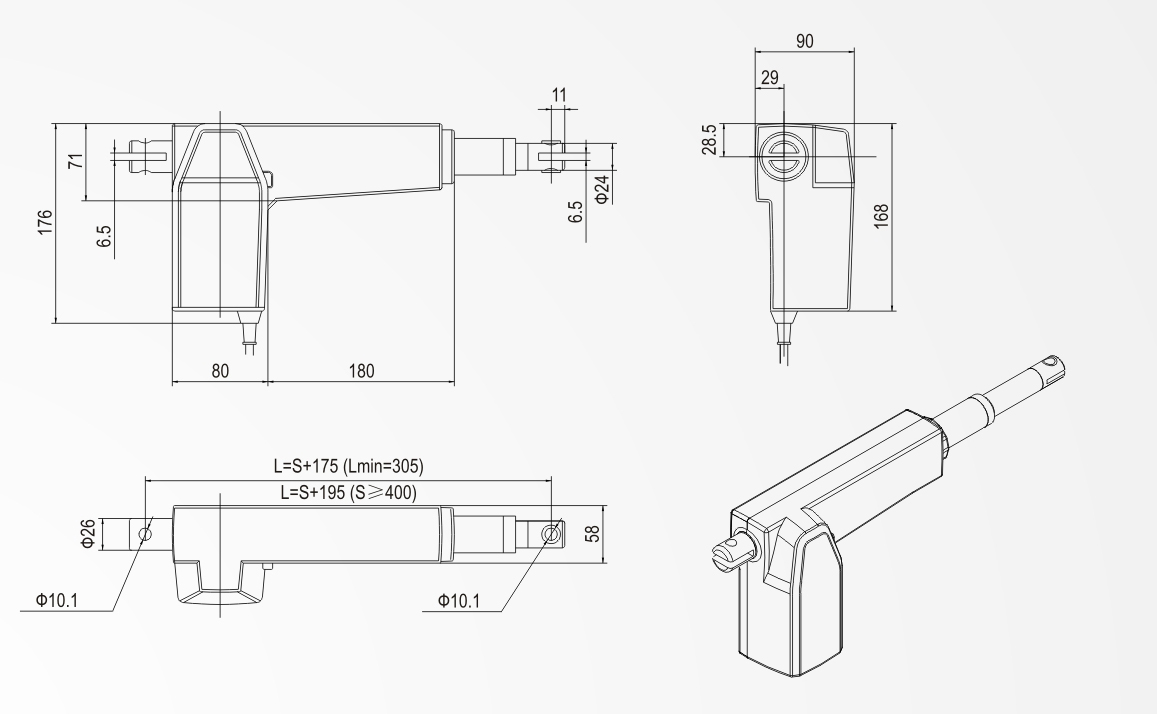 Спиральные ходовые винты и гайки ходовых винтов изготавливаются с центрирующим модифицированным профилем резьбы, который предотвращает заклинивание, пропускает загрязнения и обеспечивает самый низкий коэффициент трения.Полная универсальность достигается за счет семи стандартных поводков, предлагаемых в каталоге. Для таких высокоточных применений в стандартную комплектацию каталога входит сборка свинцовой гайки с защитой от люфта.
Спиральные ходовые винты и гайки ходовых винтов изготавливаются с центрирующим модифицированным профилем резьбы, который предотвращает заклинивание, пропускает загрязнения и обеспечивает самый низкий коэффициент трения.Полная универсальность достигается за счет семи стандартных поводков, предлагаемых в каталоге. Для таких высокоточных применений в стандартную комплектацию каталога входит сборка свинцовой гайки с защитой от люфта.
Есть свой мотор? Helix Linear предлагает микропрецизионный привод со стандартными опорами двигателя и муфтами. У нас даже есть версия с удлинителем вала для установки шкива, ручки или маховика.
Дополнительные показания
Двигайтесь с прецизионным линейным приводом
Три интересных проекта для небольшого линейного привода
10 основных преимуществ электрического линейного привода
Правильный выбор линейного привода
Чтобы получить максимальную производительность для своего приложения, необходимо выбрать правильный привод.
 Учитывая множество вариантов, это может быть непросто. Давайте подробнее рассмотрим компромиссы и проблемы.
Учитывая множество вариантов, это может быть непросто. Давайте подробнее рассмотрим компромиссы и проблемы.Линейный привод преобразует вращательное движение серводвигателя или шагового двигателя в линейное движение. Существует ряд типов приводов, включая приводы с ходовым винтом, приводы с шарико-винтовой передачей, приводы с планетарными роликовыми винтами, ременные приводы и т. д. Конструкции могут быть бесштоковыми, стержневыми или даже интегрировать двигатель в привод. Так как же выбрать?
Как и большинство вещей в технике, выбор привода зависит от области применения.Прежде чем рассматривать различные технологии, четко определите свои требования, от нагрузки, скорости и точности до необходимого срока службы и рабочего цикла. Будет ли привод работать в условиях промывки, вакуума или других неблагоприятных условиях? Сколько у вас места? И, конечно же, какой у вас бюджет?
Вооружившись этой информацией, вы сможете сделать осознанный выбор и найти технологию, которая обеспечит оптимальную производительность для инвестиций. «Как инженер-конструктор, вы имеете в виду четыре или пять технологий, — говорит Скотт Фредерик, инженер по приложениям в Kerk Motion Products Inc.(Холлис, Нью-Гэмпшир). «Когда вы проходите весь путь через конкретное приложение, к тому времени, когда вы дойдете до его конца, у вас может остаться только один или два варианта».
«Как инженер-конструктор, вы имеете в виду четыре или пять технологий, — говорит Скотт Фредерик, инженер по приложениям в Kerk Motion Products Inc.(Холлис, Нью-Гэмпшир). «Когда вы проходите весь путь через конкретное приложение, к тому времени, когда вы дойдете до его конца, у вас может остаться только один или два варианта».
Винтовая технология
Итак, каковы некоторые из этих вариантов? Линейные приводы можно условно разделить на винтовые и ременные. В первой категории вращающийся винт создает движение. Приводы винтового типа можно разделить на ходовые винты, шарико-винтовые пары и планетарные роликовые винты.
В самой простой конструкции, обычно называемой приводом ходового винта, резьбовая гайка перемещается относительно винта, создавая движение в любом незакрепленном элементе.Термин «ходовой винт» на самом деле является неправильным, поскольку все конструкции винтов основаны на ходовых винтах, но для целей этой статьи и во избежание путаницы мы будем использовать его. Технология ходового винта проста, экономична и широко используется. Приводы, как правило, работают тихо и меньше страдают от обратного хода, чем другие альтернативы.
Технология ходового винта проста, экономична и широко используется. Приводы, как правило, работают тихо и меньше страдают от обратного хода, чем другие альтернативы.
Поскольку поверхности гайки скользят по резьбе винта, возникает проблема трения и, следовательно, износа. Это снижает срок службы, эффективность, скорость, а также производительность, поскольку износ сплошной гайки может повлиять на точность/повторяемость.Сопротивление трению может даже потребовать более высоких входных крутящих моментов.
В общем, ходовые винты являются хорошим решением для экономичных приложений, которые могут допускать компромиссы в производительности. По словам Фредерика, это по-прежнему ставит технологию на удивительно широкий диапазон рынков. «Медицинская промышленность, медико-биологические науки, полупроводники, автомобилестроение и системы хранения данных — все это очень хорошо работает в области свинцового винта», — говорит он. «Отчасти причина в том, что [в этих приложениях] обычно используются более легкие грузы — 500 фунтов или меньше — и рабочие циклы, как правило, не работают круглосуточно и без выходных. «В частности, на рынках медицины и биологических наук, отмечает он, операции обычно выполняются пять дней в неделю, восемь часов в день, что вполне соответствует возможностям приводов с ходовым винтом.
«В частности, на рынках медицины и биологических наук, отмечает он, операции обычно выполняются пять дней в неделю, восемь часов в день, что вполне соответствует возможностям приводов с ходовым винтом.
В приводе с шарико-винтовой передачей движению гайки вокруг винта помогают шарикоподшипники, что снижает трение, распределяет нагрузку и повышает предсказуемость срока службы по сравнению с конструкцией ходового винта. Шарико-винтовые пары могут выдерживать большие нагрузки и обеспечивать точное позиционирование. Они обеспечивают эффективность и тягу выше, чем у ходового винта.
Как всегда, есть компромиссы. Шарико-винтовые пары дороже ходовых винтов. Подшипники могут загрязниться, расколоться или даже треснуть, что снижает производительность или приводит к отказу. Уменьшенное трение шарико-винтовой передачи облегчает управление, но также облегчает и обратный ход, например, при вертикальном применении. Шариковые подшипники также производят больше шума.
Планетарные плюсы и минусы
Следующим шагом вверх по лестнице производительности является планетарный роликовый винт. В роликовом винте планетарное расположение роликов с резьбой окружает основной вал с резьбой, увеличивая площадь поверхности, воспринимающую нагрузку, и давая название винту. Планетарные ролико-винтовые передачи обеспечивают максимально возможную тягу и срок службы любого винтового привода, работая с минимальным обслуживанием и с высокой эффективностью.
В роликовом винте планетарное расположение роликов с резьбой окружает основной вал с резьбой, увеличивая площадь поверхности, воспринимающую нагрузку, и давая название винту. Планетарные ролико-винтовые передачи обеспечивают максимально возможную тягу и срок службы любого винтового привода, работая с минимальным обслуживанием и с высокой эффективностью.
Конечно, в реальном мире все хорошее имеет свою цену, и планетарные винты не исключение. Их стоимость является самой высокой из трех технологий ходового винта.Однако для требовательных приложений планетарные винты обеспечивают производительность. «Если клиент говорит, что ему нужно, чтобы продукт прослужил 20 лет — это может быть в удаленном месте, где не требуется техническое обслуживание, — тогда, возможно, ролико-винтовая передача будет лучшим выбором», — говорит Фредерик.
Из-за количества винтов, расположенных вокруг центрального ходового винта в планетарной конструкции, гайка имеет тенденцию быть больше. Как и в случае с шарико-винтовой передачей, уменьшенное сопротивление движению означает повышенную уязвимость к обратному ходу; фактически, потеря крутящего момента двигателя может привести к свободному падению планетарного винта.
В целом, планетарный винт является лучшим решением для применений, требующих большой осевой силы и длительного срока службы. В некоторых случаях, однако, решение с шарико-винтовой передачей может стать жизнеспособной альтернативой для приложений, которые могут позволить себе цену в обмен на размер.
«Я могу получить от стандартного шарико-винтовой передачи такое же высокое усилие, как и от планетарного винта, но диаметр будет расти при прочих равных условиях», — говорит Джим Дреннен, менеджер по маркетингу Tolomatic Inc. (Хамел, Миннесота). .Как и во многих других случаях, это компромисс. «Иногда люди говорят: «Знаете, я просто возьму на себя ответственность за размер, потому что у меня все равно есть стационарное оборудование». без инструментов или в тесных помещениях, и тогда вы увидите работу планетарного винта».
Основы ременного привода
Альтернативой винтовой передаче является ременная передача, особенно когда важна скорость.«При правильном сочетании двигателя и редуктора вы приближаетесь к скорости пневматики», — говорит Дреннен, который цитирует приводы с ременным приводом со скоростью 200 дюймов в секунду (дюйм/с).
Все винтовые устройства имеют так называемую критическую скорость. По мере того, как шнек вращается быстрее, он начинает провисать наружу, образуя так называемый хлыст, вызывая вибрацию, преждевременный износ и, в конечном счете, выход из строя. Это явление зависит от диаметра винта, шага и скорости вращения — чем больше диаметр, тем выше критическая скорость.
«В настоящее время ведутся исследования и разработки в отношении того, как мы поддерживаем винт, чтобы мы могли увеличить скорость», — говорит Дреннен. «Диапазон от 10 до 50 дюймов/с может быть верхним пределом того, что имеет смысл для винта. Для приложений, которые начинаются с 50 дюймов в секунду и достигают 200 дюймов в секунду, вы смотрите на ремень».
По словам Дреннена, ремни из полиуретановой стали достаточно прочны, чтобы обеспечить приемлемый срок службы. Ременные приводы идеально подходят для горизонтальных применений, требующих скорости и усилия. Как правило, они не используются в вертикальных приложениях, так как обрыв ремня может привести к свободному падению груза.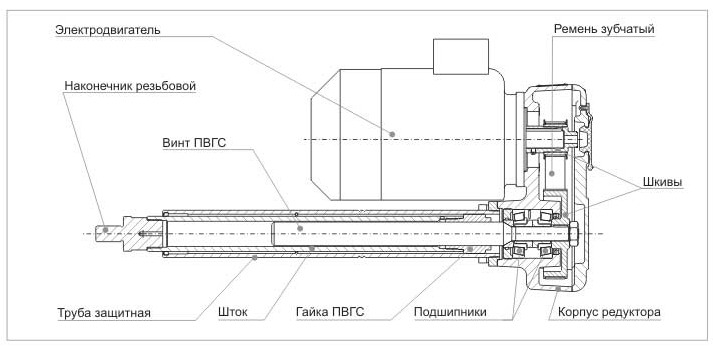
Повторяемость ременного привода не так хороша, как у альтернативных вариантов — примерно от +/- 0,002 до +/- 0,010 дюйма или выше по сравнению с +/- 0,0001 до +/- 0,003 дюйма, обеспечиваемой свинцовым или шарико-винтовым приводом конструкции. Однако для приложений, требующих скорости, ременный привод может быть лучшим выбором. «Несмотря на то, что в некоторых случаях степень точности может немного пострадать, — говорит Розенгрен, — способность достигать больших длин хода при высоких скоростях намного перевешивает любую потерю точности».
Шум или сложность не являются проблемой для ременных приводов.Однако, как и любой ремень, они растягиваются и требуют регулярного натяжения. Что касается длины хода, провисание ремня также может быть проблемой.
Бесштоковый или стержневой тип
Еще один набор компромиссов включает выбор между приводами со штоком или без штока. В стержневом приводе упорный элемент или стержень выходит из конца привода по мере движения.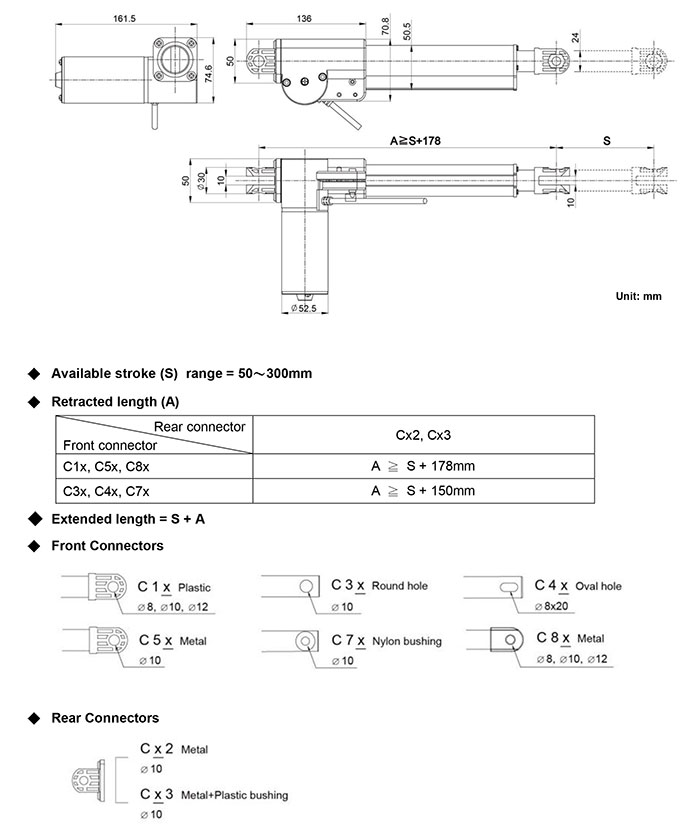 В бесштоковом исполнении корпус привода полностью окружает винт, который перемещает нагрузку на платформу, перемещающуюся вдоль верхней части привода.
В бесштоковом исполнении корпус привода полностью окружает винт, который перемещает нагрузку на платформу, перемещающуюся вдоль верхней части привода.
Эти два типа предлагают разные ценностные предложения. Привод стержневого типа создает большее усилие и превосходно подходит для приложений осевого типа, тогда как бесштоковый привод поддерживает нагрузку. «Привод стержневого типа имеет немного больше свободного пространства внутри, поэтому вы можете установить на него более крупный подшипниковый механизм, будь то шариковая гайка, роликовая гайка или трапецеидальная гайка, и благодаря этому вы можете создавать большее усилие. на заданной площади», — говорит Гэри Розенгрен из Tolomatic. «Вы не пытаетесь передать это вращательное движение линейному двигателю через другой элемент каретке привода, например, через тонкую прорезь в боковой части конструкции цилиндра [бесштокового привода].Все более-менее в порядке».
Недостатком стержневого типа является то, что в большинстве случаев требуется конструкция, способная выдерживать нагрузку. Привод в виде стержня отлично справится, например, с толканием деревянных плит в картонную коробку, но не обязательно будет лучшим решением для позиционирования этих деревянных плит для последовательности сверления отверстий в сверлильном станке. «На самом деле он не предназначен для удержания нагрузки, — говорит Фредерик. — Скорее всего, вам понадобится какая-то внешняя несущая конструкция».
Привод в виде стержня отлично справится, например, с толканием деревянных плит в картонную коробку, но не обязательно будет лучшим решением для позиционирования этих деревянных плит для последовательности сверления отверстий в сверлильном станке. «На самом деле он не предназначен для удержания нагрузки, — говорит Фредерик. — Скорее всего, вам понадобится какая-то внешняя несущая конструкция».
Помимо несущих и направляющих конструкций, бесштоковые приводы, как правило, менее подвержены биению винта (критическая скорость).Винт поддерживается с обоих концов и гайкой, по сравнению с опорой только с одного конца, как у соответствующего типа стержня. Бесштоковые приводы также занимают меньшую площадь, поскольку винты находятся внутри.
В стержневом приводе масса выступающего стержня может привести к провисанию, ухудшению жесткости и увеличению износа несущих элементов; исключением являются ситуации вертикальной тяги, в которых нагрузка может быть сосредоточена на стержне.
Одноместные штоковые приводы действительно превосходны в грязных средах, таких как пыльные фабричные полы, моющиеся среды или среды с коррозионно-активными материалами. Привод стержневого типа герметизирован, за исключением точки крепления двигателя и точки выхода штока. Для бесштоковых приводов требуются узкие щели по всей длине привода, чтобы несущая платформа могла соединяться с гайкой и двигаться вместе с ней, что затрудняет, если не делает невозможным, их герметизацию во влажной среде.
Привод стержневого типа герметизирован, за исключением точки крепления двигателя и точки выхода штока. Для бесштоковых приводов требуются узкие щели по всей длине привода, чтобы несущая платформа могла соединяться с гайкой и двигаться вместе с ней, что затрудняет, если не делает невозможным, их герметизацию во влажной среде.
Дреннен считает, что бесштоковые приводы используются недостаточно. «Я думаю, что размер рынка стержней по сравнению с бесштанговыми может быть 10 к одному», — говорит он. «Я думаю, что больше людей думают о стиле удилища.Если бы они оценили свои приложения и посмотрели, что они пытаются сделать, чтобы направлять и поддерживать внешнюю нагрузку, они бы уделили серьезное внимание бесстержневому стилю, в который встроены эти вещи ».
Интегрированные приводы
Интеграция охватывает индустрию управления движением, и приводы не являются исключением. Интегрированные приводы варьируются от конструкций, в которых винт расположен внутри двигателя так, что когда на обмотки подается напряжение, ходовой винт вращается, до версий, включающих приводы и элементы управления.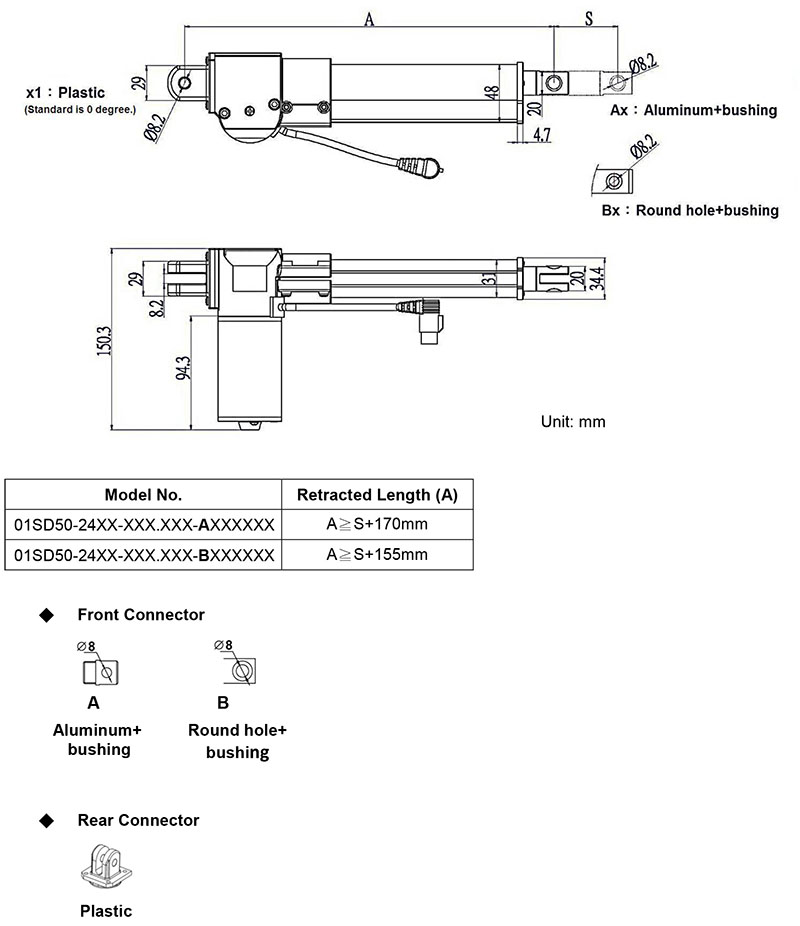
«Дальнейшая интеграция всех различных частей, кажется, является тенденцией», — говорит Джон Уокер, вице-президент по продажам и маркетингу Exlar Corp. (Чанхассен, Миннесота). «Вместо длинного вала с резьбой и длинного цилиндра с резьбой [гайка] становится ротором двигателя. Затем стержень перемещается внутри ротора, и [сборка] становится вдвое длиннее или вдвое шире, чем двигатель, закрепленный болтами рядом с приводом».
Интеграция привода в двигатель устраняет необходимость в муфте, которая устраняет вес, детали и может стать еще одной точкой отказа.Вес, в частности, становится проблемой для приложений, в которых инерция должна быть минимизирована, например, в конце манипулятора робота.
Ценность встроенного привода такая же, как и встроенного двигателя: простота обслуживания. Для приложений, в которых время простоя имеет высокую стоимость, замена привода становится такой же простой, как отвинчивание устройства и ввинчивание другого. С другой стороны, в зависимости от того, с кем вы говорите, устройства могут стоить больше, чем система, построенная из отдельных компонентов.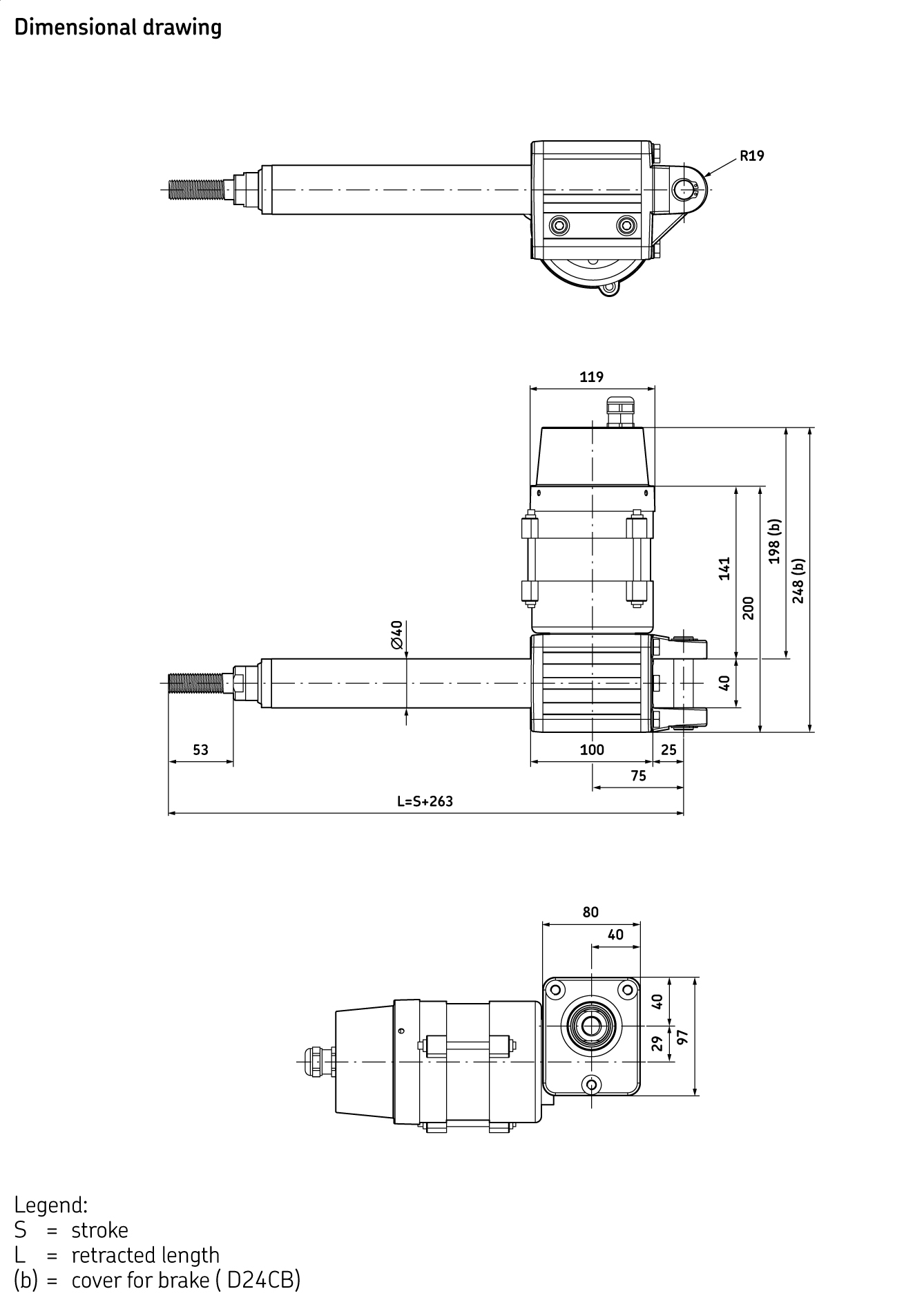 привод выходит из строя чаще, чем двигатель.«Наш опыт показывает, что электродвигатель в приводе с отдельными компонентами обычно не является первой причиной отказа, — говорит Дреннен. — Проблемы возникают из-за несущей конструкции винта».
привод выходит из строя чаще, чем двигатель.«Наш опыт показывает, что электродвигатель в приводе с отдельными компонентами обычно не является первой причиной отказа, — говорит Дреннен. — Проблемы возникают из-за несущей конструкции винта».
Как обычно, все сводится к заявке. Если время и затраты на техническое обслуживание не имеют значения, вам может подойти традиционная система. В таком приложении, как производство полупроводников, где минуты простоя могут стоить тысячи долларов, деньги, сэкономленные на диагностике и замене, с лихвой окупят компонент.
Модульность
Конечно, загвоздка в этой теории заключается в том, что для машин с большим количеством осей и различными требованиями к приводам запас запчастей может быть огромным. Один из ответов заключается в том, чтобы обойти эту проблему, пытаясь стандартизировать несколько типов приводов. Однако недостатком этого подхода может быть общая завышенная спецификация встроенного привода.
Дреннен, например, советует соблюдать осторожность. «Я часто вижу, как люди перегружают свои электродвигатели до такой степени, что платят за них больше.Но дело не только в двигателе, теперь ваши приводы и элементы управления увеличиваются в размерах и стоимости, и все это приводит к увеличению общей стоимости. Вот что даст вам стандартизация — вы сократите затраты на складские запасы, но увеличите закупки компонентов». В конечном итоге все сводится к игре с числами. «Вы должны заниматься математикой. В какой-то момент, исходя из количества различных двигателей и количества осей на станке, стандартизация может иметь смысл. В остальных случаях есть смысл просто купить актуатор вне зависимости от размера.”
«Я часто вижу, как люди перегружают свои электродвигатели до такой степени, что платят за них больше.Но дело не только в двигателе, теперь ваши приводы и элементы управления увеличиваются в размерах и стоимости, и все это приводит к увеличению общей стоимости. Вот что даст вам стандартизация — вы сократите затраты на складские запасы, но увеличите закупки компонентов». В конечном итоге все сводится к игре с числами. «Вы должны заниматься математикой. В какой-то момент, исходя из количества различных двигателей и количества осей на станке, стандартизация может иметь смысл. В остальных случаях есть смысл просто купить актуатор вне зависимости от размера.”
Все это в основном сводится к одному и тому же сообщению — ваше решение должно определяться приложением. «Начните с того, чего вы пытаетесь достичь», — советует Розенгрен. «Какова нагрузка, как она ориентирована, какого профиля движения мы пытаемся достичь? скорее всего, обеспечит не только профиль движения с заданными параметрами, но и требуемую долговечность.
Благодарности
Спасибо за полезный вклад Джону Вонгу, старшему инженеру Oriental Motor USA Corp. (Торранс, Калифорния).
Создание потайной двери с помощью линейного привода
Зачем строить потайную дверь в домашнем кинотеатре??? А почему бы не?
Когда я впервые начал строить свой домашний кинотеатр, у меня возникла идея использовать мою стойку для оборудования в качестве потайной двери. Не спрашивайте меня почему, я просто подумал, что это будет действительно крутая техническая задача, которая добавит немного уникальности моему театру.Вот как я это сделал…
Подробнее…
Материалы
Вот список больших предметов, которые я использовал. В зависимости от того, как вы решите это сделать, потребуются и другие строительные материалы.
В зависимости от того, как вы решите это сделать, потребуются и другие строительные материалы.
Крепление колес
Первым шагом является прикрепление роликов с V-образными пазами к нижней части стойки. Стойки Middle Atlantic Slim 5 поставляются с отверстиями в нижней части для крепления колесных пар, но, к сожалению, эти отверстия не совпадали с отверстиями в роликах, поэтому мне пришлось их высверливать.
Для этого сначала отметьте отверстия роликов в нижней части стойки, убедившись, что они квадратные.
Затем просверлите отверстия и прикрепите колеса болтами и гайками со стопорными шайбами.
Крепление колес
Предварительная проводка
Если вы видели другие мои посты, то знаете, что мне нравится использовать провод термостата для таких приложений. Запустите один от вашего коммутатора туда, где у вас будет источник питания и реле, а другой от линейного привода в то же место.
Вам понадобится два провода для привода и три провода для выключателя.
Черновая проводка переключателя
Дверной проем
Я рекомендую собрать стойку и колеса перед черновой прокладкой дверного проема. Таким образом, вы можете быть уверены, что у вас правильные размеры. Хороший способ получить эти размеры — временно разместить стойку с колесами, прикрепленными к рельсу.
Грубое отверстие
Стойка на колесах
Получив эти размеры, добавьте полдюйма к высоте и ширине.Это оставит четверть дюйма с каждой стороны, чтобы стойка могла свободно входить и выходить. Не забудьте включить любую отделку, которую вы планируете нанести на внутреннюю часть чернового отверстия. Я использовал 1/4 фанеры по бокам и сверху, поэтому я добавил еще полдюйма к ширине и четверть дюйма к высоте.
Установка направляющих
После завершения проема в соответствии с вашими пожеланиями поместите направляющие с установленной на них стойкой в проем и измерьте, чтобы убедиться, что они квадратные.Отметьте рейки так, чтобы они были на одном уровне с гипсокартоном.
[СОВЕТ] Обведите рельсы, чтобы, когда вы вставите их обратно позже, вы могли разместить их без необходимости снова подгонять их.
Теперь обрежьте рельсы по этим отметкам. Я вырезал свой с помощью лезвия по металлу в Sawzall, но вы можете сделать это и ножовкой.
Установка направляющих
Поместите направляющие обратно в отверстие со стойкой на них и еще раз убедитесь, что все ровно. Теперь можно прикрепить рейки к черновому полу.
Нарезные направляющие
Я прикрепил свой с помощью отделочных винтов. Вставляйте винты только в самую заднюю часть направляющих и в самую переднюю часть направляющих. Для этого вам нужно будет просверлить отверстия в направляющих.
Прикрепленные направляющие
Крепление линейного привода к стойке
Как видно из списка материалов, я использовал привод с ходом 20 дюймов. Это означает, что он переместится на 20 дюймов от полностью закрытого до полностью открытого. Этого достаточно, чтобы убрать стойку с дороги и войти в комнату.
Временно подключите источник питания 12 В к приводу и полностью выдвиньте его.
Прикрепите кронштейн линейного привода к передней нижней части стойки, как показано на рисунке выше. Вам нужно будет просверлить еще пару отверстий в стойке, а затем использовать болты, стопорные шайбы и гайки, чтобы прикрепить ее.
Это также позволяет вам легко вытащить штифт и вручную открыть стойку, если произойдет что-то, что помешает работе привода.
Крепление к стойке привода
Крепление линейного привода к стене
Когда линейный привод прикреплен к стойке и полностью выдвинут, вам необходимо определить место крепления привода к стене.Убедитесь, что стойка находится в полностью закрытом положении. Для меня я хотел его даже с моими обшивками, когда он был полностью закрыт.
В моем случае мне нужно было добавить только 3/4 дюйма, так что отделочная доска из тополя подошла идеально. Прикрепите его к стене, убедившись, что вы попали в шпильку.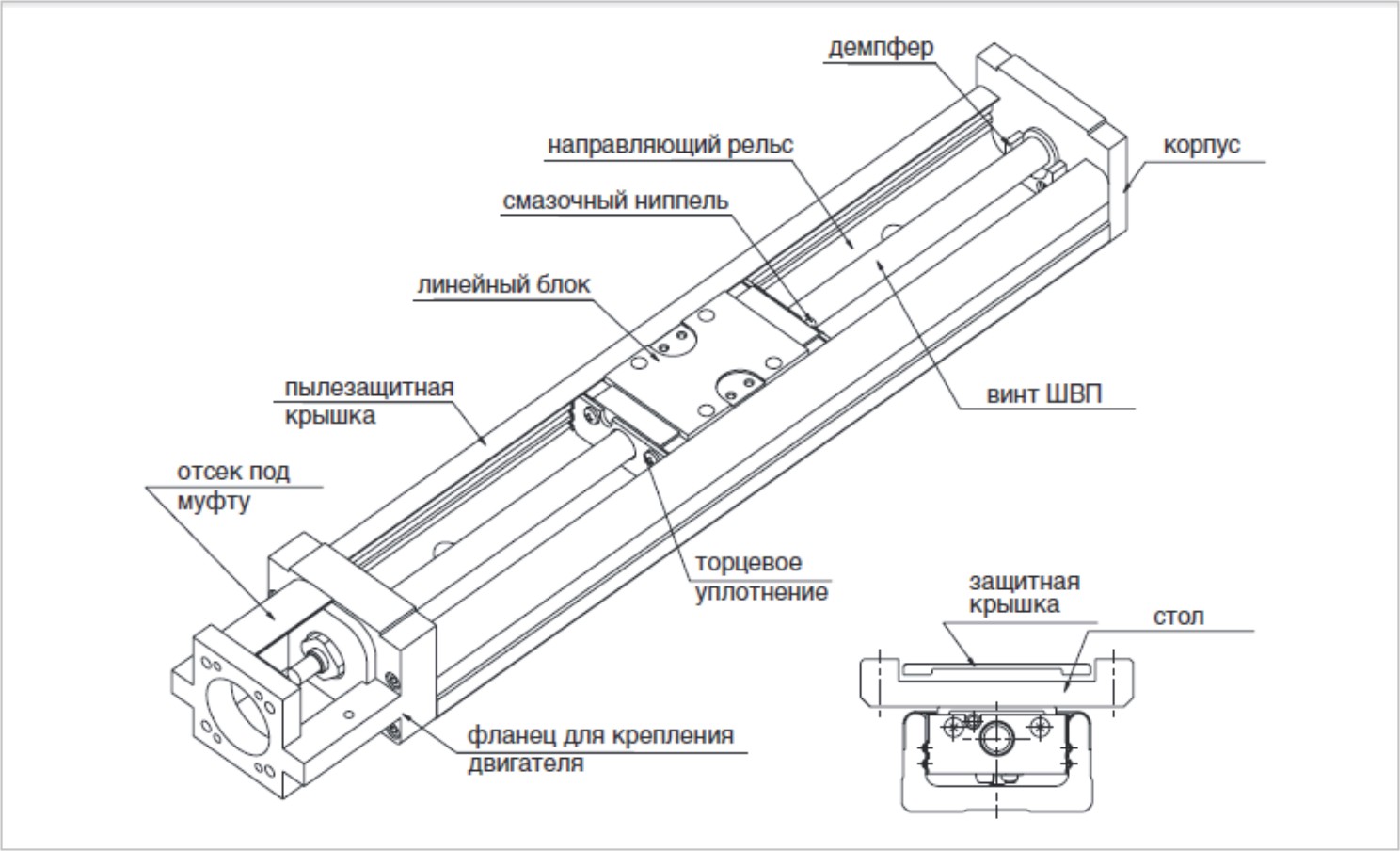 В моем случае я убедился, что 3/4-дюймовая доска надежно закреплена на двух шпильках, после чего я смог просто прикрепить привод к доске с помощью лагов. Убедитесь, что привод стоит прямо и горизонтально, иначе он может заклинить.
В моем случае я убедился, что 3/4-дюймовая доска надежно закреплена на двух шпильках, после чего я смог просто прикрепить привод к доске с помощью лагов. Убедитесь, что привод стоит прямо и горизонтально, иначе он может заклинить.
Настенный анкер линейного привода
Завершение монтажа проводки
Пришло время подключить проводку.Я не буду вдаваться во все подробности здесь, потому что модуль реле должен поставляться с инструкциями по подключению, а у вас могут быть провода другого цвета, чем у меня. Для меня проще всего было провести проводку обратно в шкаф, где у меня уже были структурированные медиа-панели для освещения и автоматические жалюзи. Это позволило мне использовать тот же источник питания 12 В, который я использую для питания своих жалюзи.
Я заменил переключатель мгновенного действия, входящий в комплект реле, на переключатель с фиксацией. Таким образом, мне не нужно было держать кнопку все время.Привод имеет встроенные ограничительные выключатели, поэтому, пока вы используете его от полностью открытого до полностью закрытого, он отключится, когда достигнет любого из них.
Беспорядочная проводка панели
Завершенная проводка привода
Завершенная проводка переключателя
Заключение
Полностью открыто
Полностью закрыто
Этот проект был .
На картинке выше вы можете видеть, что я использовал оставшиеся резиновые коврики, которые я использовал на моей передней сцене, в качестве пола в аппаратной.Я смог заполнить его вокруг рельсов для законченного вида.
Сцена домашнего кинотеатра на втором этаже>>>
Мне все еще нужно установить все мое оборудование и вставить заготовки стоек. Это придаст ему гораздо более законченный вид и затруднит определение того, что за ним есть комната.
Я также собираюсь прикрепить накладку к днищу, чтобы закрыть колеса.
Я обязательно опубликую обновление, как только сделаю это.
Как выбрать лучший линейный привод для вашего применения
Ходовой винт [SDP/SI], зубчатая рейка [QTC Gears], шарико-винтовая передача [Reliance Automation], фиксированный ремень [Bell-Everman]
Есть доступен широкий спектр приводов, и о каждом типе написаны тома.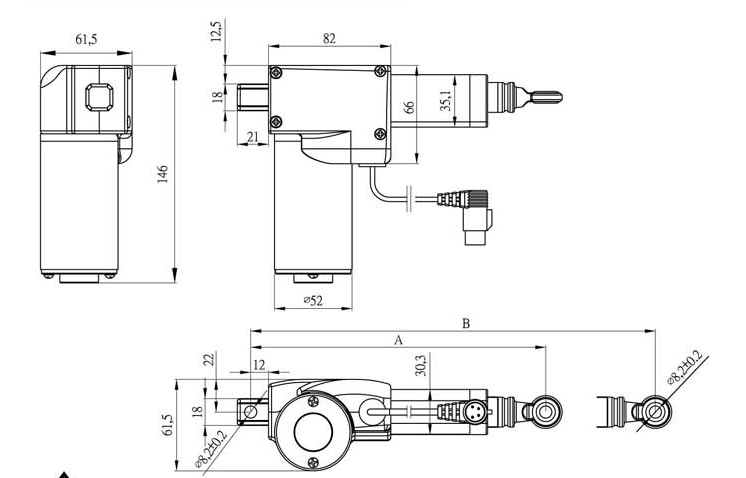 Однако информации, сравнивающей различные типы приводов в реальных условиях, не так много. Итак, как выбрать лучший тип привода для вашего приложения? Вы должны использовать ремень или ходовой винт? Рейка и шестерня или шариковый винт? Фиксированный или подвижный двигатель? Если вы строите свой собственный привод, какие типы проще всего изготовить? Какие системы являются наиболее (и наименее) надежными?
Однако информации, сравнивающей различные типы приводов в реальных условиях, не так много. Итак, как выбрать лучший тип привода для вашего приложения? Вы должны использовать ремень или ходовой винт? Рейка и шестерня или шариковый винт? Фиксированный или подвижный двигатель? Если вы строите свой собственный привод, какие типы проще всего изготовить? Какие системы являются наиболее (и наименее) надежными?
Каждый день сервосистемы Teknic приводят в действие сотни тысяч приводов. Мы не производим приводы, но для успеха наших клиентов их приводы должны работать хорошо и надежно.В течение последних тридцати лет компания Teknic работала вместе с нашими OEM-клиентами, помогая им выбирать и проектировать механические системы для оптимизации характеристик движения их машин. Мы многому научились за эти годы, и мы хотели бы поделиться этими знаниями с широкой общественностью.
Общее сравнение типов приводов
Если бы все машины имели одинаковые требования к движению, был бы один тип привода, но существует много разных машин с разными требованиями.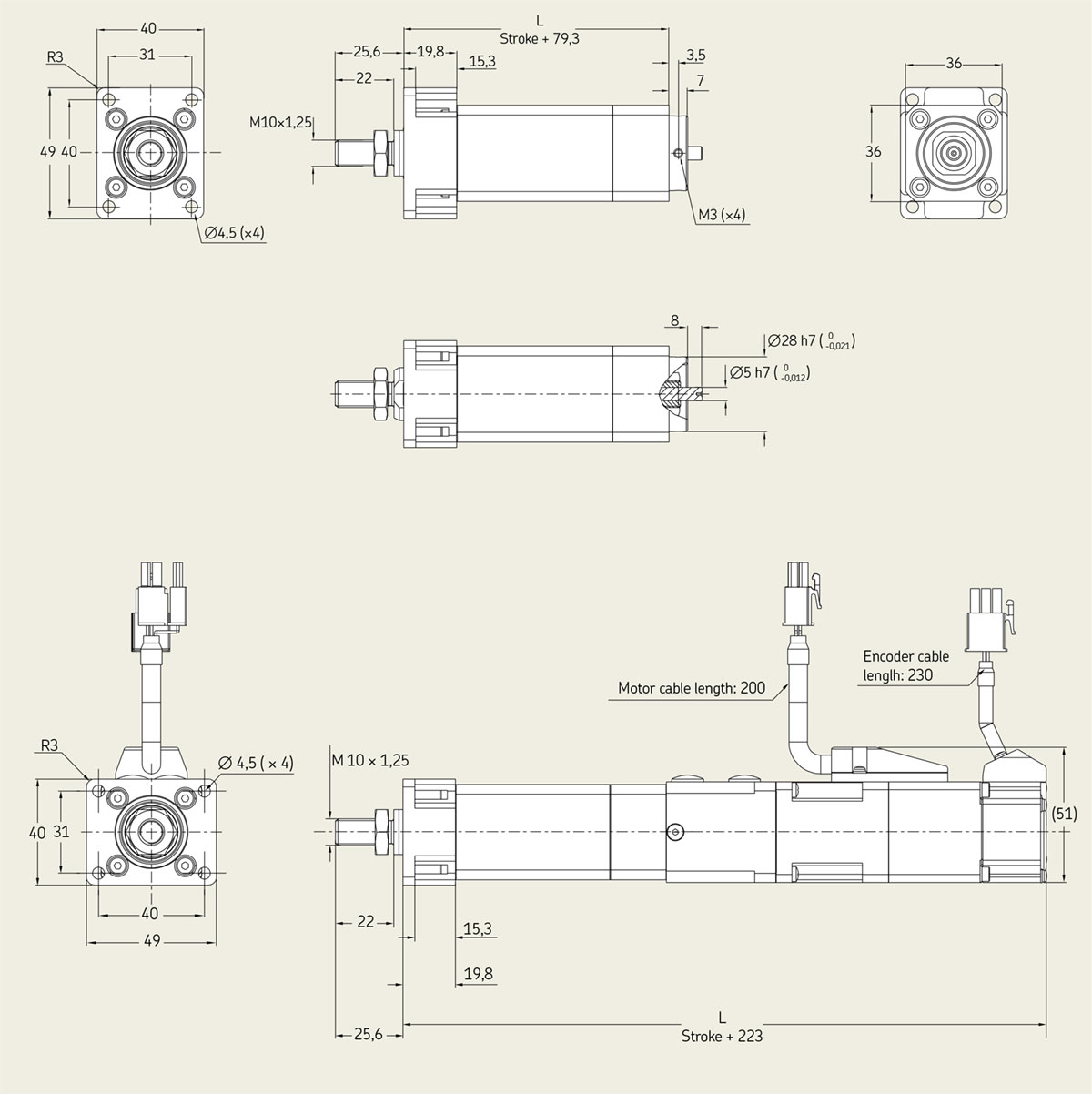 Поэтому существуют различные типы приводов для достижения этих требований.Итак, как узнать, какой привод подходит для вашего применения?
Поэтому существуют различные типы приводов для достижения этих требований.Итак, как узнать, какой привод подходит для вашего применения?
Вот основные факторы, которые необходимо учитывать при выборе привода:
- Цена: иногда цена определяется требованиями к производительности, но иногда производительность может быть снижена для достижения целевых цен.
- Требуемые скорость, ускорение и рабочий цикл.
- Общая движущаяся нагрузка (включая массу, момент, трение, любые силы, приложенные во время движения и т. д.).
- Требования к точности и повторяемости.
- Требования к длине хода.
Компания Teknic разработала приведенные ниже графики для сравнения типов приводов с использованием приведенных выше показателей. Исходя из нашего опыта, эти графики показывают, где OEM-производители добиваются стабильного успеха . Есть актуаторы, которые не входят в эти диапазоны, но они все еще успешны, но эти исключительные случаи обычно стоят дороже или требуют неустойчивого технического внимания в производственной среде.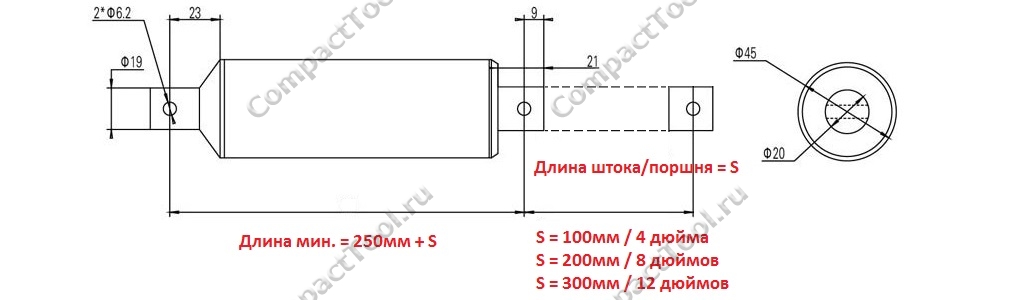
Например, как привод с фиксированным ремнем, так и привод с подвижным ремнем будут эффективно работать с малой нагрузкой и коротким ходом, ускоряясь при 0.1 г. Разница в производительности между этими двумя приводами для этого конкретного применения незначительна. Привод с фиксированным ремнем дороже, поэтому обычно нет смысла использовать его в подобных приложениях.
Приблизительный ценовой диапазон
Таблица 1: Ценовой диапазон типов приводов
Максимальный диапазон скоростей (в метрах в секунду)
Таблица 3: Диапазон ускорений типов приводов
Диапазон подвижной нагрузки (в фунтах)
Таблица 4: Диапазон подвижной нагрузки для типов приводов
Ошибка позиционирования на метр перемещения (в микронах)
3 Таблица 9 5: Погрешность положения на метр хода приводов типов
Повторяемость на метр пути (в микронах)
Таблица 7: Расстояние перемещения типов приводов
Специальные приводные системы: примеры использования, плюсы и минусы, соображения по выбору, советы и рекомендации
Шар Винты
Рис. 1: Шарико-винтовая передача [Reliance Automation]
1: Шарико-винтовая передача [Reliance Automation]
Обзор применения:
Из всех приводов, описанных в этой статье, шарико-винтовые пары могут использоваться в самых разных областях.Они хорошо работают как с тяжелыми, так и с легкими нагрузками, точно работают на высоких и низких скоростях и обладают отличной повторяемостью и точностью. Шарико-винтовые пары обеспечивают стабильную производительность от машины к машине при минимальных усилиях по сборке. Даже процесс выбора шариковых винтов довольно прост.
С другой стороны, эти преимущества имеют свою цену: деньги (иногда большие деньги).
Шариковый винт Плюсы и минусы:
Таблица 8: Плюсы и минусы шариковых винтов
Соображения по выбору:
1.Более высокая стоимость не обязательно означает лучшую производительность или ценность.
- Шарико-винтовые пары являются ярким примером. Есть качественные американские и немецкие поставщики, предлагающие эквивалентный продукт за половину стоимости популярных торговых марок. Магазин вокруг тщательно.
 Магазин вокруг тщательно.
Магазин вокруг тщательно.2. Количество пусков влияет на грузоподъемность, цену, уровень шума и многое другое.
- Для заданного шага увеличение числа пусков иногда может улучшить общие характеристики шарико-винтовой передачи, например, допустимую нагрузку.Люди часто думают, что у большего количества стартов нет недостатков. Однако многозаходные ШВП дороже, громче и создают больше возможностей для отказа, чем однозаходные.
3. Важно понимать требования к уплотнению.
- Ненужные уплотнения (гайки, подшипников и т. д.) добавляют значительное трение, что означает необходимость использования более мощных (и дорогих) двигателей. С другой стороны, устройства, которые должным образом не герметизированы для условий эксплуатации, быстро выходят из строя.
4. Катаные и шлифованные винты.
- Катаные винты дешевле, но исторически менее точны, чем прецизионные шлифованные винты. Однако недавние технологические усовершенствования позволили повысить точность катаных шнеков, сохранив при этом ценовое преимущество по сравнению с шлифованными шнеками. В результате катаные винты часто представляют собой привлекательную ценность для многих приложений.
 В результате катаные винты часто представляют собой привлекательную ценность для многих приложений.
В результате катаные винты часто представляют собой привлекательную ценность для многих приложений.Советы и рекомендации по использованию шариковых винтов:
1. Используете ли вы редуктор или ременную ступень между двигателем и винтом? Если да, рассмотрите одну из двух вещей:
- Используйте более высокий редуктор с более быстрым ходом винта (сохраняя общее линейное расстояние, проходимое за один оборот двигателя).Вы получите ряд преимуществ, переместив эффективную «передачу» с винта на редуктор или ременную ступень. При сочетании более высокого передаточного отношения и более длинного шага система по-прежнему будет поддерживать ту же линейную силу, но эта настройка уменьшит отраженную инерцию, слышимый шум и вероятность биения винта.
- Если возможно, переключитесь на прямое заворачивание винта. Прямой привод часто повышает точность и уменьшает люфт, а также одновременно снижает стоимость системы — более крупный сервопривод часто стоит меньше денег, чем комбинация редуктора и меньшего двигателя.

2. Связь между двигателем и шнеком имеет решающее значение (но обычно об этом не думают).
- Компания Teknic рекомендует кулачковые муфты («паук») с твердостью по Шору A 92 или 98 (см. рисунок ниже). По причинам, выходящим за рамки этой статьи, Teknic рекомендует не использовать крестовины Shore D и металлические крестовины. Кроме того, обязательно используйте муфту, в которой используется метод крепления вала зажимным способом, а не установочный винт.
- Сильфонные муфты будут работать хорошо, но они более дороги и имеют более жесткие требования к соосности, чем кулачковые муфты.Если механика машины (двигатель и шнек) имеют разные диаметры вала, может потребоваться изготовление сильфонной муфты по индивидуальному заказу. Кулачковые муфты состоят из трех отдельных частей, поэтому их можно приобрести с различными размерами отверстий и легко смешивать и подбирать в соответствии с требованиями.
- Спиральные муфты имеют низкую жесткость на кручение, что ограничивает общую полосу пропускания системы и может вызвать дополнительный механический резонанс. Спиральные муфты иногда приемлемы в приложениях, использующих шаговые двигатели, потому что податливость пружины может сгладить зубчатое зацепление шагового двигателя.Однако для приложений, использующих высокопроизводительные сервоприводы, винтовые муфты ограничивают производительность, и вам следует избегать их использования.
- Не используйте сплошную муфту. Жесткие муфты требуют почти идеальной центровки валов, что нецелесообразно при сборке нескольких машин. Во многих случаях использование жесткой муфты приводит к долговременному повреждению системы двигателя и винтовых подшипников.
 Спиральные муфты иногда приемлемы в приложениях, использующих шаговые двигатели, потому что податливость пружины может сгладить зубчатое зацепление шагового двигателя.Однако для приложений, использующих высокопроизводительные сервоприводы, винтовые муфты ограничивают производительность, и вам следует избегать их использования.
Спиральные муфты иногда приемлемы в приложениях, использующих шаговые двигатели, потому что податливость пружины может сгладить зубчатое зацепление шагового двигателя.Однако для приложений, использующих высокопроизводительные сервоприводы, винтовые муфты ограничивают производительность, и вам следует избегать их использования.Ходовые винты
Рис. 3. Ходовые винты [SDP/SI]
Обзор применения:
Не всегда легко правильно выбрать ходовые винты, но при правильном выборе ходовые винты обеспечивают хорошую точность и повторяемость для деньги. Кроме того, хорошо спроектированные ходовые винты долговечны и обеспечивают воспроизводимые результаты в условиях крупносерийного производства.
Кроме того, хорошо спроектированные ходовые винты долговечны и обеспечивают воспроизводимые результаты в условиях крупносерийного производства.
Ходовой винт Плюсы и минусы:
|
|
Таблица 9: Плюсы и минусы ходовых винтов
Соображения по выбору:
1.Винты с короткими выводами
неэффективны.- По мере увеличения «передаточного числа» ходового винта (т. е. уменьшения линейного расстояния, проходимого за один оборот винта), вы одновременно снижаете эффективность винта. Мы часто видим, что клиенты выбирают слишком тонкие отведения (слишком много оборотов на пройденное линейное расстояние), где выигрыш в механическом рычаге заканчивается чистой потерей силы из-за потери эффективности.
2. Тщательно выбирайте материалы.
- Ходовые винты имеют гайку, которая скользит по поверхности винта. Выбор оптимального сочетания материала гайки и винта имеет решающее значение из-за трения. Например, латунная гайка на стальном винте имеет сухой (без смазки) коэффициент трения (μ) 0,41, тогда как гайка из полиацеталя на винте с тефлоновым покрытием имеет сухой μ 0,08. Это изменение материала приводит к изменению эффективности на 220% для ходового винта диаметром 15 мм и ходовым винтом 10 мм. Трение — это лишь одно из многих соображений, связанных с материалами (к другим относятся температура окружающей среды, условия окружающей среды, рабочий цикл и т. д.).)
3. При использовании полимерных гаек соблюдайте ограничения «PV».
- Полимерные гайки имеют номинал для непрерывной работы (который ниже пикового номинала), называемый рейтингом скорости давления (или сокращенно PV). Давление между винтом и гайкой (которое равно движущей силе, деленной на площадь контакта между винтом и гайкой), наряду с достаточной относительной скоростью поверхности будет выделять тепло. Достаточно высокая температура деформирует и необратимо разрушит полимерную гайку. Также следует учитывать рабочий цикл движения.Часто винт может вращаться с относительно высокой скоростью и/или давлением в течение коротких периодов времени (чтобы гайка могла достаточно остыть между последующими движениями). Все производители ходовых винтов с готовностью предоставляют эту информацию, чтобы вы могли выбрать подходящий винт для своего применения.
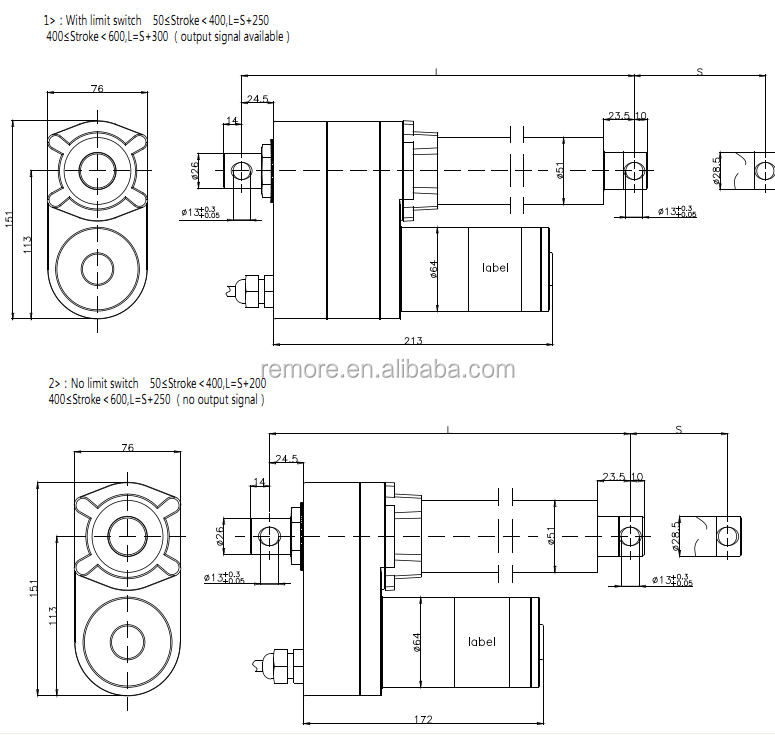 Достаточно высокая температура деформирует и необратимо разрушит полимерную гайку. Также следует учитывать рабочий цикл движения.Часто винт может вращаться с относительно высокой скоростью и/или давлением в течение коротких периодов времени (чтобы гайка могла достаточно остыть между последующими движениями). Все производители ходовых винтов с готовностью предоставляют эту информацию, чтобы вы могли выбрать подходящий винт для своего применения.
Достаточно высокая температура деформирует и необратимо разрушит полимерную гайку. Также следует учитывать рабочий цикл движения.Часто винт может вращаться с относительно высокой скоростью и/или давлением в течение коротких периодов времени (чтобы гайка могла достаточно остыть между последующими движениями). Все производители ходовых винтов с готовностью предоставляют эту информацию, чтобы вы могли выбрать подходящий винт для своего применения.4. Выберите правильное количество пусков.
- Быстрый ход (большое линейное расстояние хода за один оборот винта) имеет «мертвое» пространство между витками резьбы — пространство, которое можно использовать для дополнительных независимых витков.Эти независимые нити (называемые «запусками») увеличивают мощность усилия для данного отведения, но также увеличивают трение (следовательно, тепло) и влияют на рейтинг PV. Производители ходовых винтов помогут с этим выбором, но не думайте, что дополнительные пуски всегда лучше.
Рис.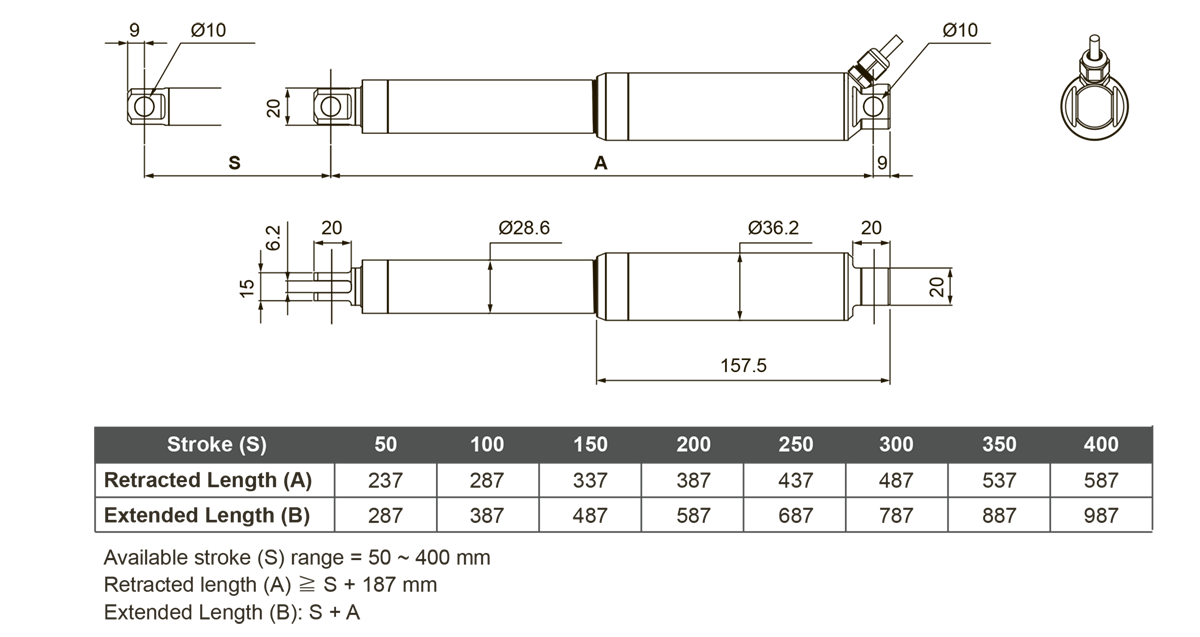 3: Демонстрация пуска ходового винта [Thomson Linear]
3: Демонстрация пуска ходового винта [Thomson Linear]
Советы и рекомендации по использованию ходовых винтов:
1. Если важны скорость и ускорение, используйте «быстрые» ходы с достаточным количеством пусков, чтобы выдерживать требуемые усилия.
- Компания Teknic приобрела два готовых привода ходового винта с идентичными характеристиками, за исключением одного отличия: в одном приводе используется однозаходный (1-заходный) ходовой винт 5 мм, а в другом — 4-заходный ходовой винт 20 мм. ходовой винт. Привод с шагом 5 мм ускоряет нашу полезную нагрузку с 0,5 G до максимальной скорости 333 мм/с. Привод с шагом 20 мм, использующий тот же двигатель и такое же количество электроэнергии, разгоняет ту же полезную нагрузку с 1,7 G до скорости 1333 мм/с. Таким образом, всего лишь смена потока позволила увеличить ускорение на 340 % и увеличить линейную скорость на 400 %.
2. Шестерни больше в редукторной ступени и меньше в винтовой.
- Если между двигателем и шнеком имеется редуктор, увеличьте коэффициент редуктора и пропорционально выберите более длинный (быстрый) ход. Например, если у вас есть соотношение 2:1 для шага 5 мм, измените его на соотношение 4:1 и шаг 10 мм. Это изменение повышает эффективность системы (от 15% до 50% в зависимости от коэффициента трения) и снижает механический износ, звуковой шум и отраженную инерцию.
 Например, если у вас есть соотношение 2:1 для шага 5 мм, измените его на соотношение 4:1 и шаг 10 мм. Это изменение повышает эффективность системы (от 15% до 50% в зависимости от коэффициента трения) и снижает механический износ, звуковой шум и отраженную инерцию.
Например, если у вас есть соотношение 2:1 для шага 5 мм, измените его на соотношение 4:1 и шаг 10 мм. Это изменение повышает эффективность системы (от 15% до 50% в зависимости от коэффициента трения) и снижает механический износ, звуковой шум и отраженную инерцию.3.Связь между двигателем и винтом имеет решающее значение (но обычно об этом не думают).
- Компания Teknic рекомендует кулачковые муфты («паук») с твердостью по Шору A 92 или 98 (см. рисунок ниже). По причинам, выходящим за рамки этой статьи, Teknic рекомендует не использовать крестовины Shore D и металлические крестовины. Кроме того, обязательно используйте муфту, в которой используется метод крепления вала зажимным способом, а не установочный винт.
- Сильфонные муфты будут работать хорошо, но они более дороги и имеют более жесткие требования к соосности, чем кулачковые муфты.Если механика машины (двигатель и шнек) имеют разные диаметры вала, может потребоваться изготовление сильфонной муфты по индивидуальному заказу. Кулачковые муфты состоят из трех отдельных частей, поэтому их можно приобрести с различными размерами отверстий и легко смешивать и подбирать в соответствии с требованиями.
- Спиральные муфты имеют низкую жесткость на кручение, что ограничивает общую полосу пропускания системы и может вызвать дополнительный механический резонанс. Спиральные муфты иногда приемлемы в приложениях, использующих шаговые двигатели, потому что податливость пружины может сгладить зубчатое зацепление шагового двигателя.Однако для приложений, использующих высокопроизводительные сервоприводы, винтовые муфты ограничивают производительность, и вам следует избегать их использования.
- Не используйте сплошную муфту. Жесткие муфты требуют почти идеальной центровки валов, что нецелесообразно при сборке нескольких машин. Во многих случаях использование жесткой муфты приводит к долговременному повреждению системы двигателя и винтовых подшипников.
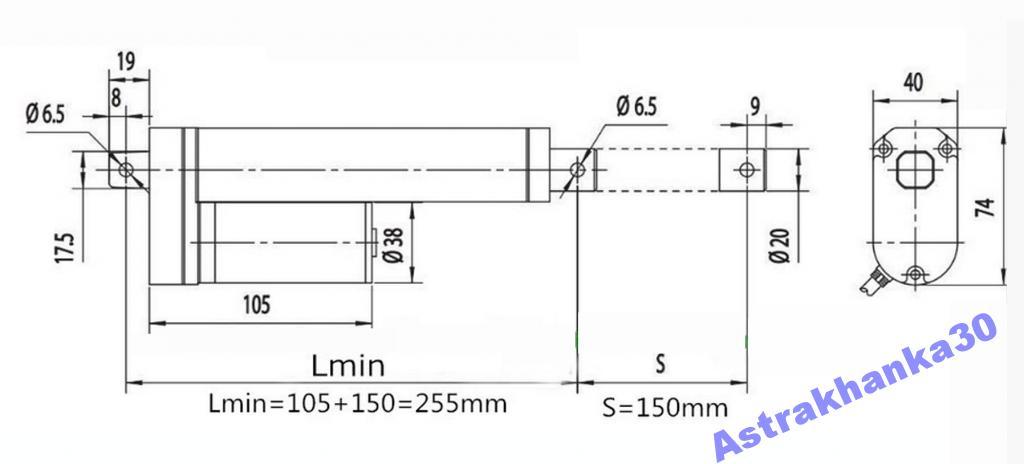 Кулачковые муфты состоят из трех отдельных частей, поэтому их можно приобрести с различными размерами отверстий и легко смешивать и подбирать в соответствии с требованиями.
Кулачковые муфты состоят из трех отдельных частей, поэтому их можно приобрести с различными размерами отверстий и легко смешивать и подбирать в соответствии с требованиями.Рис. 4: Крестовина [Ruland], сильфонная муфта [EC21], винтовая муфта [инструменты для технического обслуживания]
4. Определенные типы гаек могут уменьшить люфт и улучшить повторяемость.
Определенные типы гаек могут уменьшить люфт и улучшить повторяемость.
- Если у вас есть горизонтальное приложение, где важны точность и повторяемость, используйте гайки с защитой от люфта. Хотя подробности выходят за рамки этой статьи, противозазорные гайки имеют элемент приложения усилия (которым могут быть кольца, пружины, сжатые в осевом направлении пальцы и т. д.), который устраняет зазор между составной гайкой и винтом. Гайки с защитой от люфта зависят от области применения, поэтому обязательно обратитесь к производителю ходового винта за помощью в выборе подходящей гайки.
5. В некоторых случаях ходовые винты могут устранить тормоза с отключением питания.
- Ходовые винты имеют различную эффективность при движении вперед (двигатель приводит винт в движение и линейно перемещает груз) и обратном движении (линейно движущийся груз назад вращает винт, т. е. нагрузка вращает двигатель). Хорошим примером обратного движения является сила тяжести, действующая на вертикальную нагрузку. Правильное сочетание шага винта и коэффициента трения зафиксирует гайку на месте, когда нагрузка давит на винт.Никакая сила не заставит эти винты двигаться назад, потому что линейная сила создает большую составляющую вектора силы трения, чем составляющая вектора, создающая вращение. Некоторые люди внедряют тормоза с отключением питания, чтобы предотвратить падение вертикальных грузов при отключении питания двигателя, но тормоза увеличивают стоимость и сложность. С другой стороны, многие люди тщательно выбирают винты с определенными параметрами, которые не допускают обратного хода (но при этом удовлетворяют требованиям прямого хода). Эти винты обеспечивают более низкую стоимость и более простую конструкцию.Следует отметить, что винты с нулевой эффективностью обратного завинчивания также не очень эффективны в прямом направлении, поэтому вам необходимо учитывать все факторы.
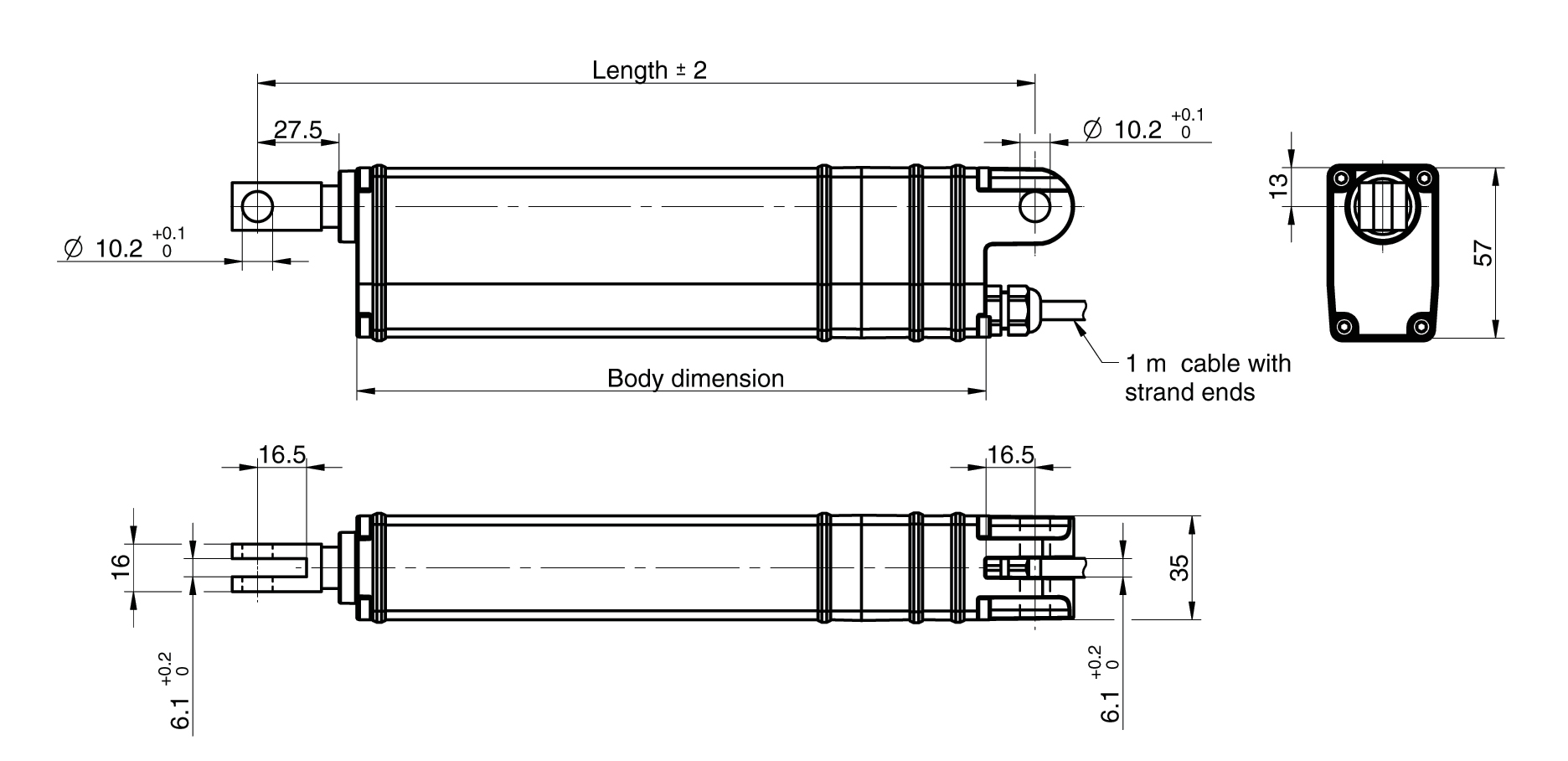 Правильное сочетание шага винта и коэффициента трения зафиксирует гайку на месте, когда нагрузка давит на винт.Никакая сила не заставит эти винты двигаться назад, потому что линейная сила создает большую составляющую вектора силы трения, чем составляющая вектора, создающая вращение. Некоторые люди внедряют тормоза с отключением питания, чтобы предотвратить падение вертикальных грузов при отключении питания двигателя, но тормоза увеличивают стоимость и сложность. С другой стороны, многие люди тщательно выбирают винты с определенными параметрами, которые не допускают обратного хода (но при этом удовлетворяют требованиям прямого хода). Эти винты обеспечивают более низкую стоимость и более простую конструкцию.Следует отметить, что винты с нулевой эффективностью обратного завинчивания также не очень эффективны в прямом направлении, поэтому вам необходимо учитывать все факторы.
Правильное сочетание шага винта и коэффициента трения зафиксирует гайку на месте, когда нагрузка давит на винт.Никакая сила не заставит эти винты двигаться назад, потому что линейная сила создает большую составляющую вектора силы трения, чем составляющая вектора, создающая вращение. Некоторые люди внедряют тормоза с отключением питания, чтобы предотвратить падение вертикальных грузов при отключении питания двигателя, но тормоза увеличивают стоимость и сложность. С другой стороны, многие люди тщательно выбирают винты с определенными параметрами, которые не допускают обратного хода (но при этом удовлетворяют требованиям прямого хода). Эти винты обеспечивают более низкую стоимость и более простую конструкцию.Следует отметить, что винты с нулевой эффективностью обратного завинчивания также не очень эффективны в прямом направлении, поэтому вам необходимо учитывать все факторы.Резюме:
Существует кривая обучения, связанная с правильными спецификациями ходовых винтов, но ходовые винты могут предложить неоспоримые преимущества по сравнению с конкурирующими механизмами, если они правильно подобраны для применения (например, доступность, точность, набор опций, меньшее обслуживание и т.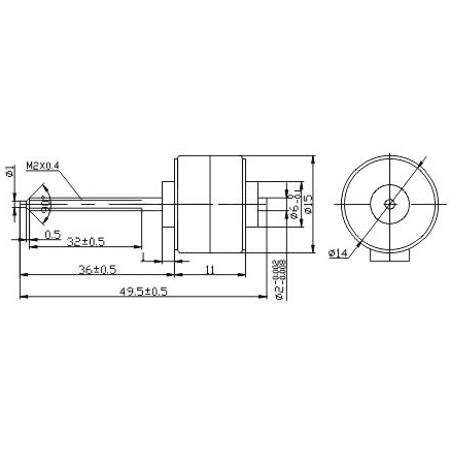 д.). ). Кроме того, ходовые винты позволяют легко достичь повторяемости от машины к машине по сравнению с другими недорогими технологиями механического привода.
д.). ). Кроме того, ходовые винты позволяют легко достичь повторяемости от машины к машине по сравнению с другими недорогими технологиями механического привода.
Зубчатая рейка и шестерни
Рис. 5. Зубчатая рейка
Обзор применения:
Шестерни и зубчатые рейки широко используются в приложениях с большими нагрузками и длинными ходами из-за их грузоподъемности и цены. Однако производительность системы и цена варьируются из-за различий в геометрических свойствах, и существуют значительные различия в качестве от производителя к производителю.
Зубчатая рейка предлагает ряд уникальных преимуществ по сравнению с другими технологиями линейного перемещения.Например, вы можете приводить в движение несколько шестерен (таким образом, несколько независимых осей) на рейку, или двигатель может приводить в движение рейку (а не шестерню), создавая «стержень рейки» (шток, который толкает как пневматический поршень) для обеспечения точной втиснуться в небольшой след.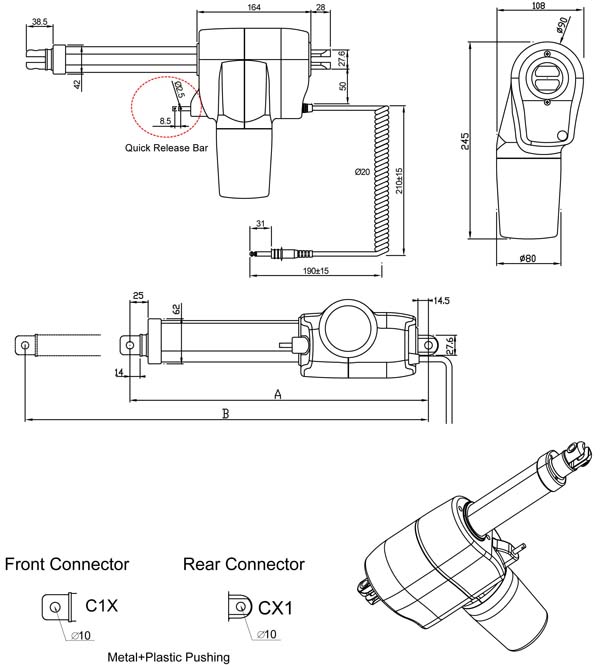 (Обратите внимание, что вы можете выполнить оба этих примера с винтами, вращая гайку вместо винта, но это обычно сложнее.)
(Обратите внимание, что вы можете выполнить оба этих примера с винтами, вращая гайку вместо винта, но это обычно сложнее.)
Стандартная (прямая зубчатая рейка) зубчатая рейка Плюсы и минусы:
|
1.Производительность остается неизменной даже при изменении длины привода.
- Характеристики движения и требования к двигателю остаются неизменными при изменении хода привода. Характеристики других приводов (податливость, отраженная инерция, резонанс и т. д.) ухудшаются по мере увеличения общего хода. В результате реечные шестерни являются популярным выбором для OEM-производителей, производящих крупногабаритное оборудование или оборудование различных размеров.
 д.) ухудшаются по мере увеличения общего хода. В результате реечные шестерни являются популярным выбором для OEM-производителей, производящих крупногабаритное оборудование или оборудование различных размеров.
д.) ухудшаются по мере увеличения общего хода. В результате реечные шестерни являются популярным выбором для OEM-производителей, производящих крупногабаритное оборудование или оборудование различных размеров.2. Расходы хорошо масштабируются.
- Стоимость «первого дюйма хода» выше для механических конструкций с «движущимся двигателем» (например,г. зубчатая рейка и шестерни), чем для конструкций «стационарный двигатель». Приводы с «движущимся двигателем» несут дополнительную нагрузку, связанную со всей сборкой двигателя, управлением электронной цепью, гибкими кабелями и т. д. Однако стоимость добавления дополнительного хода к реечной системе является одной из самых низких по сравнению с любой приводной технологией. В результате, если ваше приложение требует более двух метров хода, зубчатая рейка часто является лучшим вариантом.
3. Зубчатая рейка не лучший выбор для определенных сред, таких как лаборатории или чистые помещения.
- Важно понимать, в какой среде вы (или ваши клиенты) будете запускать приложение. Реечная система — не самый тихий привод, и слышимый тон может быть неприятным. Кроме того, смазка в системе негерметична, поэтому механика не особенно чистая.
 Реечная система — не самый тихий привод, и слышимый тон может быть неприятным. Кроме того, смазка в системе негерметична, поэтому механика не особенно чистая.
Реечная система — не самый тихий привод, и слышимый тон может быть неприятным. Кроме того, смазка в системе негерметична, поэтому механика не особенно чистая.4. Вы можете смягчить некоторые недостатки — за определенную плату.
- Винтовые зубья. Спиральные зубья (как на шестерне, так и на рейке) входят в зацепление под углом, что сглаживает движение и уменьшает люфт.Обратной стороной является снижение эффективности, поскольку тяга вперед максимальна при угле зуба 90 градусов (т. Е. Прямозубая шестерня). Кроме того, косозубые шестерни должны следовать за углом зуба (таким образом, съезжая с рейки), поэтому вам необходимо предусмотреть надлежащие несущие конструкции, чтобы шестерни удерживались на рейках. Оба фактора (снижение эффективности и модернизация несущей конструкции) увеличивают затраты на установку на 100-200 долларов за ось, но винтовые зубья целесообразны в приложениях, требующих более высокой точности, меньшего люфта и/или более плавного движения.
- Роликовые зубчатые рейки. В этих системах вместо зубчатых шестерен используются шестерни, состоящие из роликов с опорой на подшипники. Ролики плавно движутся, обеспечивают предварительную нагрузку (для уменьшения люфта), работают со скоростью до 10 метров в секунду и на слух тише, чем обычные стойки. Недостатком является то, что роликовые рейки имеют ограниченные варианты диаметра шестерни и стоят намного дороже (до 1000 долларов США больше, чем спиральные конструкции). Резонно сравнивать роликовые рейки с шарико-винтовыми парами (учитывая их производительность и цену), даже несмотря на то, что конструкция представляет собой рейку и шестерню.Тем не менее, даже по сравнению с шарико-винтовыми парами роликовые стойки стоят дороже, пока длина хода не достигает двух-четырех метров. (Точная длина хода, при которой цены начинают сходиться, зависит от марок роликовой шестерни и шарико-винтовой пары.)
Учитывая эти факторы, роликовые рейки конкурентоспособны только в длинноходных и высокоточных приложениях — за одним исключением. Исключение составляют поворотные приложения . Стойки с дугообразными роликами могут быть конкурентоспособными по стоимости и обеспечивать исключительную жесткость по сравнению с редуктором волн деформации (начиная с плит среднего диаметра, ~250 мм+).
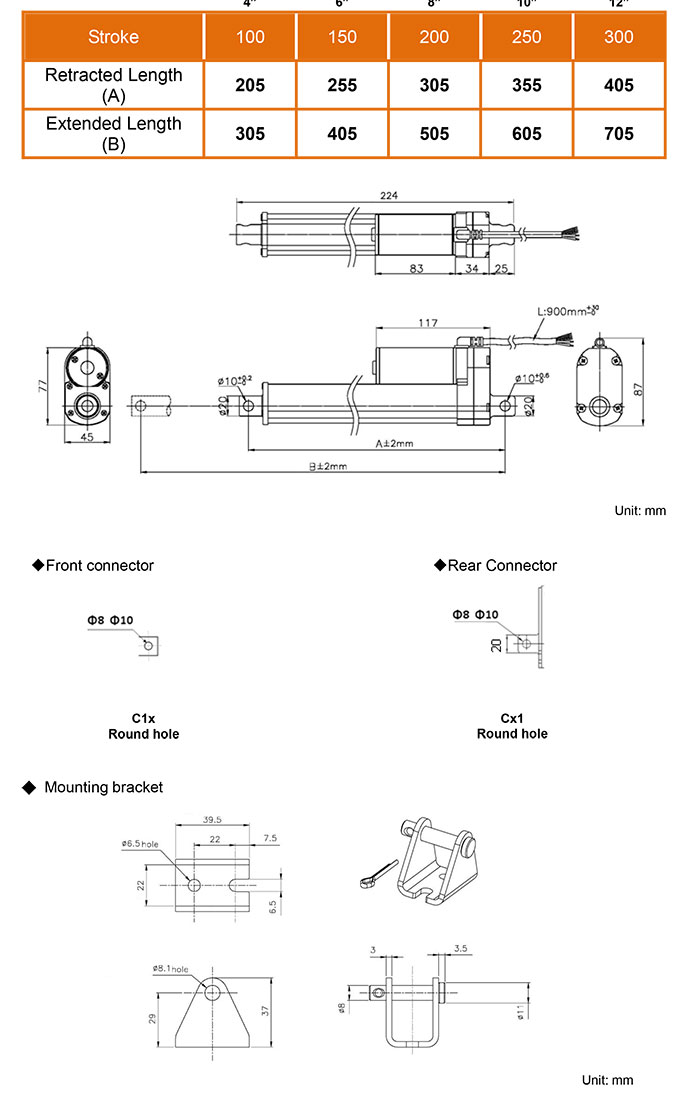
Рис. 6. Зубчатая рейка и шестерня
 Исключение составляют поворотные приложения . Стойки с дугообразными роликами могут быть конкурентоспособными по стоимости и обеспечивать исключительную жесткость по сравнению с редуктором волн деформации (начиная с плит среднего диаметра, ~250 мм+).
Исключение составляют поворотные приложения . Стойки с дугообразными роликами могут быть конкурентоспособными по стоимости и обеспечивать исключительную жесткость по сравнению с редуктором волн деформации (начиная с плит среднего диаметра, ~250 мм+).Рис. 9. Дугообразная рейка и шестерня
Советы и рекомендации по использованию реечной шестерни:
1. Диаметр шага шестерни оказывает большое влияние на конструкцию (помимо только рычага).
- При сравнении двух шестерен разного диаметра, но одинаковой конструкции, шестерня меньшего диаметра имеет больший механический рычаг. Кроме того, люфт коробки передач приводит к меньшему линейному расстоянию. Шестерня меньшего размера обеспечивает большее усилие и превосходную точность по сравнению с шестерней большего диаметра.С другой стороны, шестерня большего диаметра имеет больше зацепленных зубьев, что снижает вибрацию и уменьшает износ. Эффективным компромиссом часто является меньшая шестерня с более мелким шагом зубьев (обычно старайтесь задействовать 5 или более зубьев). Это позволяет использовать преимущества шестерен меньшего размера, а также снижает износ и вибрацию.
 Это позволяет использовать преимущества шестерен меньшего размера, а также снижает износ и вибрацию.
Это позволяет использовать преимущества шестерен меньшего размера, а также снижает износ и вибрацию.2. Регулярное техническое обслуживание необходимо.
- При правильном обслуживании зубчатая рейка и шестерня рассчитаны на сотни миллионов оборотов шестерни.Тем не менее, многим клиентам не удается обслуживать эту механику (несмотря на простые процедуры), и компоненты изнашиваются уже через несколько месяцев. Вам следует подумать об инвестировании в самосмазывающиеся системы, если вы не ожидаете, что сможете поддерживать идеальный уровень обслуживания.
3. Используйте подходящую рейку и шестерню от производителя приводов.
- Компания Teknic использовала лазерный интерферометр для измерения общей погрешности шага между первым и последним зубьями в двух разных 2-метровых системах хода.Один стеллаж был обработан механическим цехом; другой от Atlanta Drives. Оба устройства имели идентичные характеристики на бумаге. Стандартная стойка имела накопленную ошибку 15 мил, а фирменная — менее 2 мил. Улучшенная стойка стоит всего на 46 долларов больше (по состоянию на 6/2018) — безусловно, стоящая инвестиция.
 Улучшенная стойка стоит всего на 46 долларов больше (по состоянию на 6/2018) — безусловно, стоящая инвестиция.
Улучшенная стойка стоит всего на 46 долларов больше (по состоянию на 6/2018) — безусловно, стоящая инвестиция.4. Рассмотрим встроенную стойку (также известную как стойка и направляющая).
- Конструкции со встроенными стойками и направляющими обычно стоят дороже, чем отдельные детали, но многие OEM-производители считают, что это лучшее соотношение цены и качества.Интеграция стойки и направляющей экономит место, сокращает время производства и устраняет проблемы с выравниванием, а также необходимость обработки отдельных монтажных поверхностей.
Рис. 10. Встроенная зубчатая рейка
Резюме:
Зубчатая рейка и шестерни обеспечивают гибкость и значительную грузоподъемность и часто используются в тяжелых приложениях с длинным ходом. Они особенно распространены у OEM-производителей, производящих крупногабаритное оборудование с различной конфигурацией хода. Для высокоточных приложений на расстоянии 2 метра и более целесообразно использовать спиральные зубчатые рейки и, возможно, даже роликовые рейки, а не обычные прямые (шпоровые) рейки.
Подвижные зубчатые ремни
Рис. 11. Подвижный зубчатый ремень [роллон]
Обзор применения:
Зубчатые ремни экономичны, бесшумны, воспроизводимы и могут значительно ускорять легкие нагрузки. Ремни существуют уже несколько десятилетий, поэтому отдельные детали доступны из многих источников, но это создает двойную проблему. Во-первых, при покупке деталей из разных источников вам нужно уметь сочетать эти компоненты. Во-вторых, качество «универсальных» деталей варьируется от производителя к производителю.Таким образом, правильный выбор и поиск источников являются равными проблемами. Тем не менее, ременные системы являются экономичными и надежными приводами для приложений с умеренной нагрузкой и разумными требованиями к точности.
Движущиеся ремни Плюсы и Минусы:
|
|
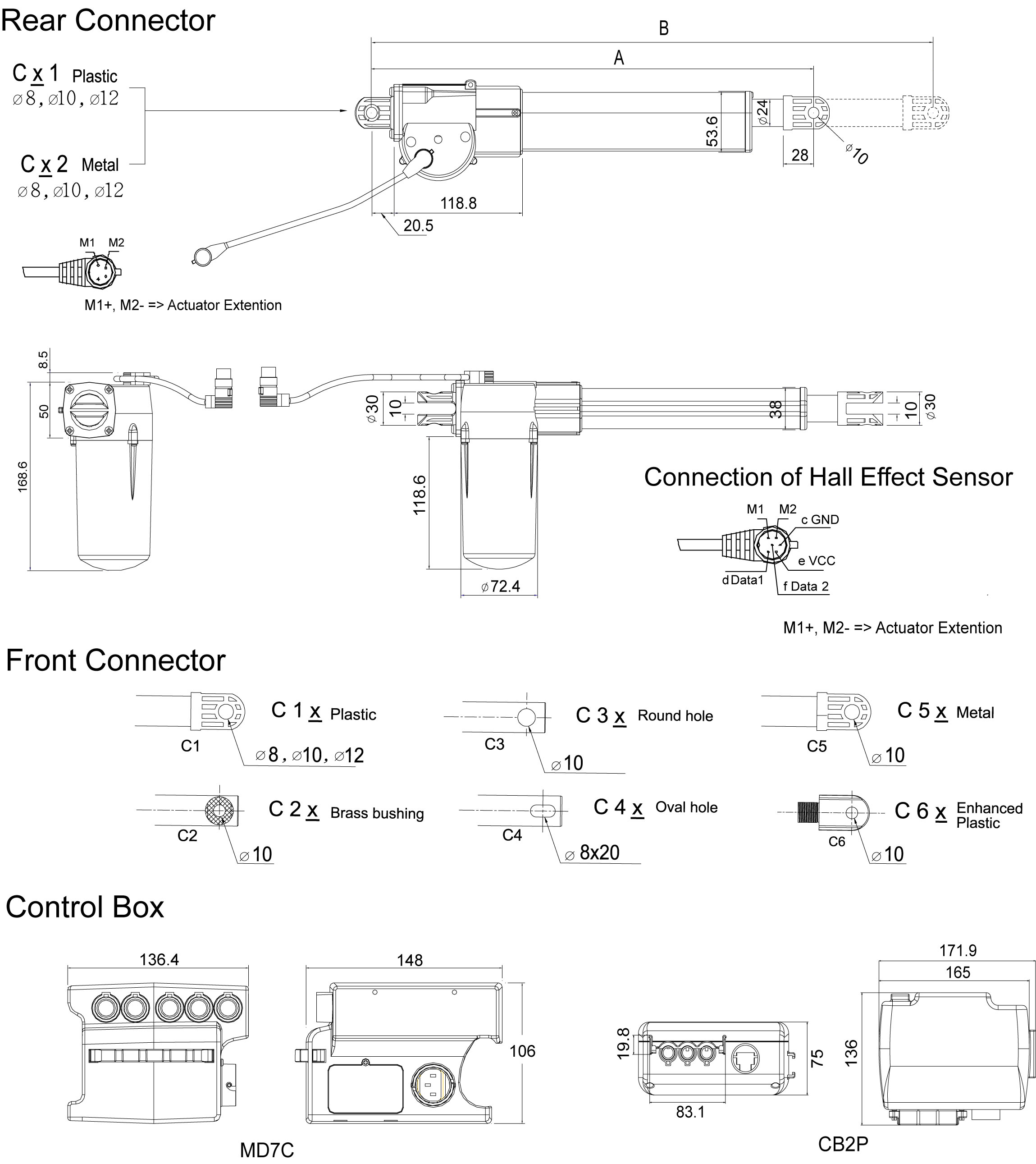 , обеспечение надлежащего натяжения ремня)
, обеспечение надлежащего натяжения ремня)быть малозатратным и эффективным. Однако существует больше проблем и ловушек, связанных с проектированием ременных приводов, чем других типов приводов. Ременный привод «под ключ» устраняет большинство проблем, и мы настоятельно рекомендуем этот путь, но если вы делаете свой собственный ременный привод, необходимо учитывать следующие факторы:
1.Приводы с подвижным ремнем особенно чувствительны к изменениям в трех областях:
- Ширина ремня: Зубчатые ремни рассчитаны на мощность, а не на динамику системы. Самый узкий ремень, рассчитанный на соответствие вашим характеристикам ускорения, выдерживающий указанный вес нагрузки и выдерживающий рабочий цикл вашего приложения, скорее всего, будет слишком податливым (растягивающимся) для качественных характеристик движения. Итак, примените «правило ширины 1-2-3» (подробнее об этом в разделе «Советы и рекомендации» для ремней).
- Инерция нагрузки: Многие люди не забывают учитывать массу, но забывают (или игнорируют) инерцию нагрузки, отражающуюся на двигателе.Игнорирование отраженной инерции неразумно в любой системе движения. Так зачем специально поднимать это здесь? Ремни имеют высокую эффективность обратного хода и низкую эффективную передачу, поэтому, если вы толкаете груз вручную, он имеет уникально легкое ощущение кончиками пальцев. Эта комбинация убаюкивает слишком многих инженеров, заставляя их игнорировать эффект отраженного инерционного рассогласования.
- Длина хода: Производительность привода может варьироваться в зависимости от длины хода. Ременные приводы, в частности, настолько уникально чувствительны к изменениям хода, что часто требуют различных конфигураций для каждой длины хода.Ремень может только тянуть груз, он не может его толкать. Итак, ускоряющий или замедляющий груз испытывает силу с противоположной стороны. Это также означает, что длина «тянущего» ремня изменяется в зависимости от того, где находится груз в пределах хода оси. Более того, на каждую единицу увеличенной длины хода изменение длины ремня в два раза превышает это расстояние. В результате, даже умеренные изменения хода привода могут потребовать изменения шага, ширины, профиля зуба и электрической мощности для поддержания постоянной производительности движения.
 Итак, примените «правило ширины 1-2-3» (подробнее об этом в разделе «Советы и рекомендации» для ремней).
Итак, примените «правило ширины 1-2-3» (подробнее об этом в разделе «Советы и рекомендации» для ремней).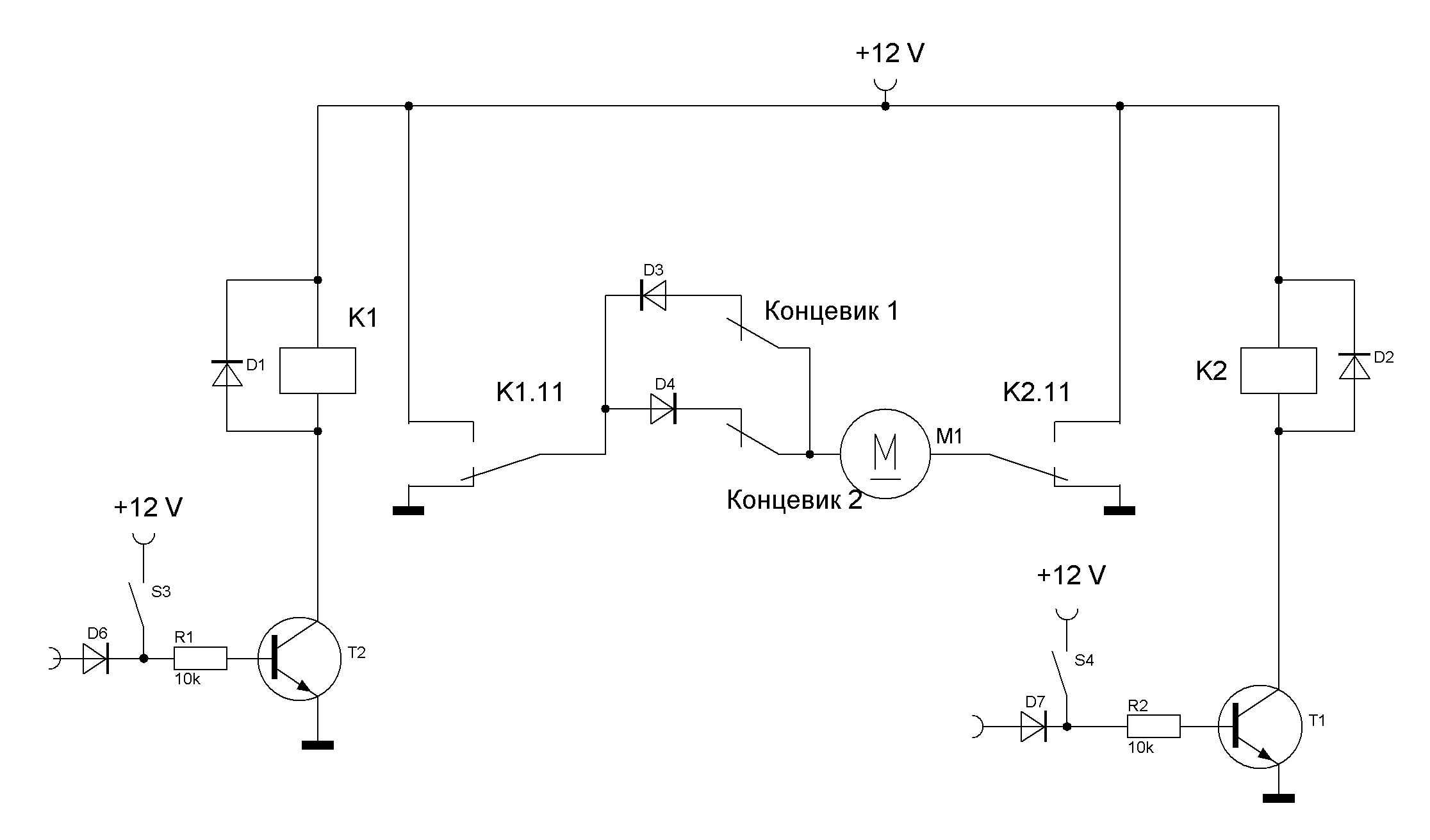 Это также означает, что длина «тянущего» ремня изменяется в зависимости от того, где находится груз в пределах хода оси. Более того, на каждую единицу увеличенной длины хода изменение длины ремня в два раза превышает это расстояние. В результате, даже умеренные изменения хода привода могут потребовать изменения шага, ширины, профиля зуба и электрической мощности для поддержания постоянной производительности движения.
Это также означает, что длина «тянущего» ремня изменяется в зависимости от того, где находится груз в пределах хода оси. Более того, на каждую единицу увеличенной длины хода изменение длины ремня в два раза превышает это расстояние. В результате, даже умеренные изменения хода привода могут потребовать изменения шага, ширины, профиля зуба и электрической мощности для поддержания постоянной производительности движения.Рис. 12: Диаграмма длины ремня ГРМ
2. Условия эксплуатации влияют на производительность.
- Оптимальный материал ремня зависит от рабочей температуры, потенциального загрязнения, разрядности статического электричества и т. д. Например, обычная смазка для подшипников снижает ожидаемый срок службы некоторых неуретановых ремней на целых 75%. Прежде чем выбирать материал ремня, вам следует проконсультироваться с производителем ремня и объяснить особенности вашей рабочей среды.
3. Перед вводом оси в эксплуатацию необходимо запустить, а затем снова натянуть приводы ремня.
- Большинство ременных приводов имеют период обкатки, в течение которого ременная система теряет натяжение, но после этого периода натяжение остается постоянным. Чтобы предотвратить проблемы, проверьте привод в течение периода обкатки, а затем повторно натяните ремень перед фактическим использованием (причины потери натяжения в первые несколько часов использования выходят за рамки этой статьи, но достаточно сказать практически ни один ремень системы не застрахован от этого).
4. Надлежащее натяжение является ключом к долговечности и производительности.
- Слишком сильное натяжение сокращает срок службы ремня, подшипников и плавность хода. Слишком слабое натяжение ухудшает воспроизводимость, сокращает срок службы ремня и приводит к потере положения из-за храпового механизма. Даже когда вы находитесь в допустимом диапазоне натяжения, постоянное натяжение от привода к приводу является ключом к воспроизводимой производительности.
Советы и рекомендации по использованию движущихся лент:
1. Примените правило «1-2-3» ширины ленты.
Примените правило «1-2-3» ширины ленты.
- Определите рекомендуемую производителем минимальную ширину ремня в зависимости от вашей нагрузки, требований к крутящему моменту и рабочего цикла. Хотя эта минимальная ширина не приведет к катастрофическим сбоям, она, вероятно, слишком подходит для идеального динамического управления движением. Чтобы получить хорошую производительность, выберите ремень в два раза шире, но не втрое, потому что чрезмерная ширина влечет за собой другие недостатки (такие как более высокие требования к несущей конструкции, более высокие требования к крутящему моменту двигателя и потеря плавности хода).
2.Высокая отраженная инерция проблематична для ременных систем. Не игнорируйте это.
- Общепринято, что отношение отраженной нагрузки к моменту инерции двигателя должно быть не более 10:1. Сервосистемы Teknic имеют функции, которые обеспечивают большее (иногда намного большее ) соотношение, когда нагрузка и двигатель тесно связаны. Приемлемое отношение инерции нагрузки к инерции двигателя зависит от многих факторов, но тип привода является одним из них. . Проблемы, связанные с ремнями, заключаются в следующем: 1) низкий механический рычаг увеличивает отраженную инерцию, 2) ускорение вызывает растяжение/прогиб ремня и 3) жесткость соединения нагрузки с двигателем варьируется в зависимости от направления приложения силы.Таким образом, для данного веса груза движущиеся ремни часто имеют более высокую отражательную инерцию 90 209 и 90 210 большую динамическую изменчивость, чем другие системы механического привода.
 Приемлемое отношение инерции нагрузки к инерции двигателя зависит от многих факторов, но тип привода является одним из них. . Проблемы, связанные с ремнями, заключаются в следующем: 1) низкий механический рычаг увеличивает отраженную инерцию, 2) ускорение вызывает растяжение/прогиб ремня и 3) жесткость соединения нагрузки с двигателем варьируется в зависимости от направления приложения силы.Таким образом, для данного веса груза движущиеся ремни часто имеют более высокую отражательную инерцию 90 209 и 90 210 большую динамическую изменчивость, чем другие системы механического привода.
Приемлемое отношение инерции нагрузки к инерции двигателя зависит от многих факторов, но тип привода является одним из них. . Проблемы, связанные с ремнями, заключаются в следующем: 1) низкий механический рычаг увеличивает отраженную инерцию, 2) ускорение вызывает растяжение/прогиб ремня и 3) жесткость соединения нагрузки с двигателем варьируется в зависимости от направления приложения силы.Таким образом, для данного веса груза движущиеся ремни часто имеют более высокую отражательную инерцию 90 209 и 90 210 большую динамическую изменчивость, чем другие системы механического привода.3. Используйте алюминиевые шкивы.
- Стальные шкивы имеют почти в три раза большую инерцию, чем алюминиевые шкивы того же размера. Когда ваша полезная нагрузка невелика (в этом случае ремни часто являются оптимальным выбором), ускоряющие стальные шкивы могут потребовать такого же или большего крутящего момента, как и ускорение самого груза.
4.Привяжите или надежно зафиксируйте шкив на валу двигателя.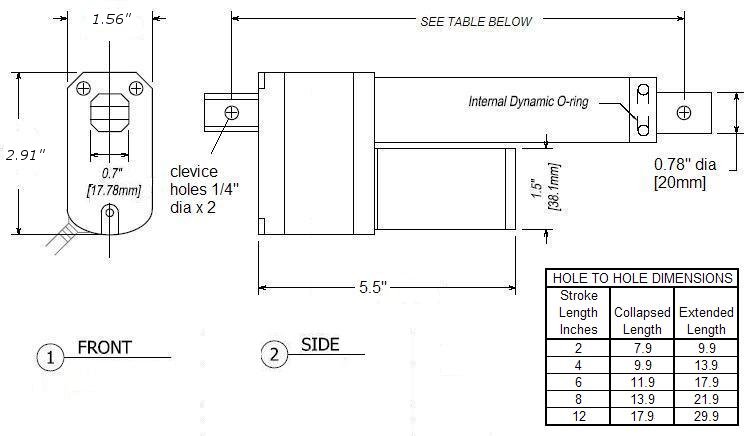
- Точка, в которой вал двигателя соединяется со шкивом, является обычной неисправностью ременных приводов. Никогда не используйте установочный винт или ключ сами по себе. Используйте фиксаторы, стопорные ступицы или клей (например, фиксирующий клей Loctite). Подробнее о создании высокоэффективной связи читайте в этой статье.
5. Тщательно выбирайте профиль зуба.
- Форма зуба влияет на гладкость, повторяемость, точность и допустимое усилие.Приведенные ниже пункты верны для большинства сервоприводов:
- Зубья трапециевидной формы могут передавать значительную силу и обеспечивают низкий люфт, но зубья трапециевидной формы громче, чем зубья других форм, и могут вызывать неравномерное или «щелкающее» движение. Более того, трапециевидные зубья быстро изнашиваются при работе с высоким крутящим моментом/высокой скоростью из-за концентрации напряжения на границе ременного шкива.
- Криволинейные зубья (также известные кака. модифицированные круглые ремни, ремни HTD или «Gates») представляют собой легко вращающиеся зубья, разработанные для 1) снижения концентрации напряжений в профилях ловушек и 2) повышения пропускной способности. Компромисс, однако, заключается в том, что криволинейные конструкции первого поколения имеют больший люфт.
- Модифицированные криволинейные зубья имеют малую глубину, больший боковой угол, чем у ремней других конструкций, а нагрузка распределяется между зацепленными зубьями и на основании между зубьями.Это приводит к высокой способности передачи усилия, плавному вращению и почти полному отсутствию храповика. К сожалению, модифицированные криволинейные ремни имеют ограниченный выбор материалов.
Рисунок 13 [Pfeifer Industries]
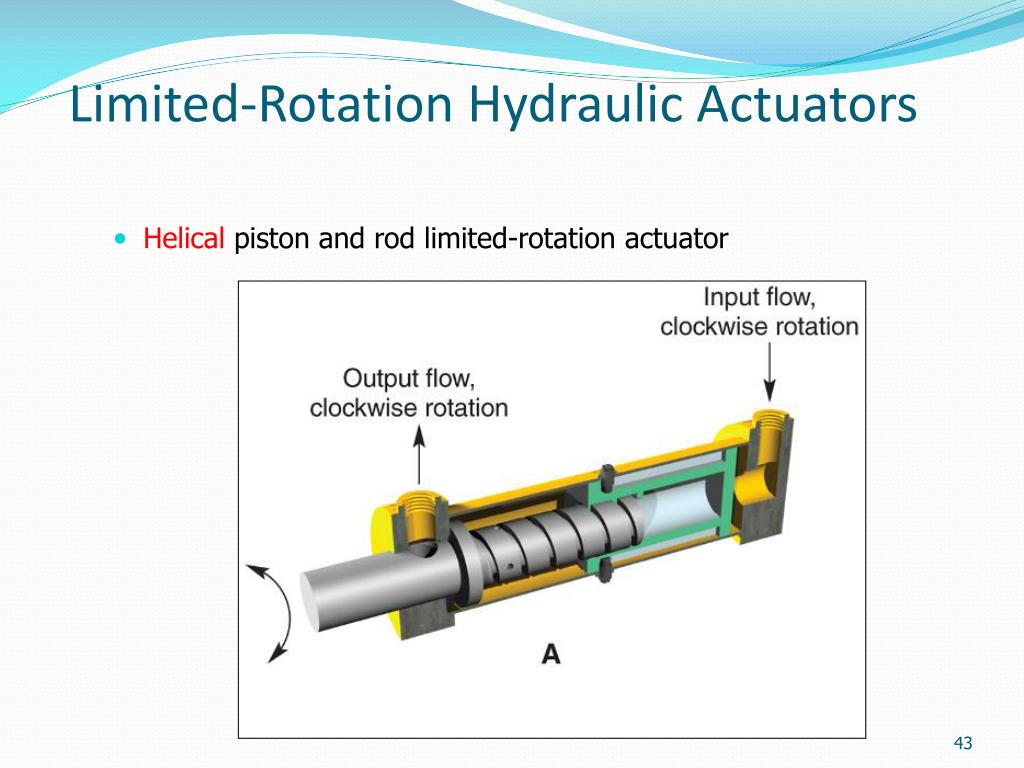 модифицированные круглые ремни, ремни HTD или «Gates») представляют собой легко вращающиеся зубья, разработанные для 1) снижения концентрации напряжений в профилях ловушек и 2) повышения пропускной способности. Компромисс, однако, заключается в том, что криволинейные конструкции первого поколения имеют больший люфт.
модифицированные круглые ремни, ремни HTD или «Gates») представляют собой легко вращающиеся зубья, разработанные для 1) снижения концентрации напряжений в профилях ловушек и 2) повышения пропускной способности. Компромисс, однако, заключается в том, что криволинейные конструкции первого поколения имеют больший люфт.Рисунок 14 [Pfeifer Industries]
Рис. 15 [Pfeifer Industries]
6. Учитывайте компромиссы между шагом зубьев и шириной.
- Увеличение шага зубьев (при сохранении всех остальных параметров без изменений) может незначительно увеличить усилие, но значительно снизить точность. Обычно для позиционирования лучше всего подходит немного более широкий ремень с более мелкими зубьями.Независимо от шага, продолжайте применять правило 1-2-3 при выборе ширины ремня.
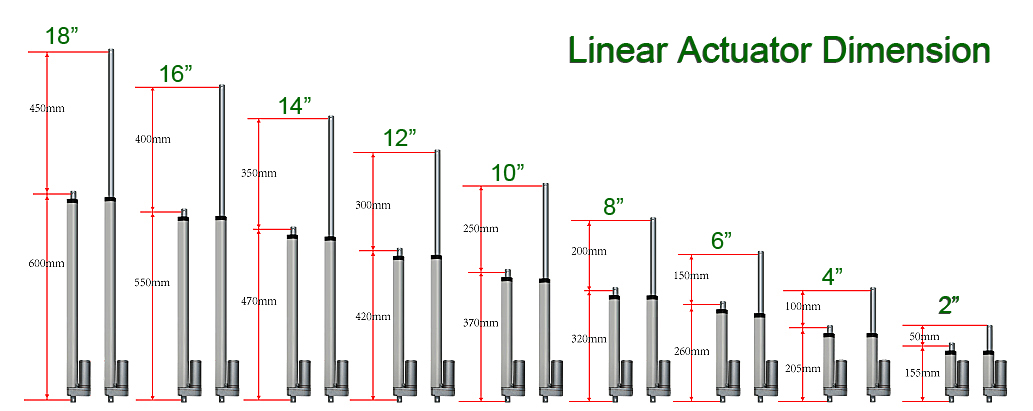 Обычно для позиционирования лучше всего подходит немного более широкий ремень с более мелкими зубьями.Независимо от шага, продолжайте применять правило 1-2-3 при выборе ширины ремня.
Обычно для позиционирования лучше всего подходит немного более широкий ремень с более мелкими зубьями.Независимо от шага, продолжайте применять правило 1-2-3 при выборе ширины ремня.7. Купите подходящий шкив для вашего ремня, а не просто совместимый.
- Ремни работают со шкивами с соответствующими профилями зубьев, но производительность значительно улучшается при использовании шкива, специально разработанного для этого ремня. Например, шкив HTD будет работать с ремнем GT-2 (у него такой же номинальный профиль зубьев), но пара будет менее гладкой и менее точной, чем ремень GT-2 с соответствующим шкивом GT-2.
8. Тщательно выбирайте материалы ремня.
- Ремни, которые выглядят почти одинаково, обладают различной жесткостью, точностью и долговечностью в зависимости от того, что находится под их поверхностью (тип корда, плетение, армирующий материал и т. д.).
Резюме:
Ремни имеют больше элементов, которые необходимо указать, особенно в отношении их конструкции, чем любая другая технология механического привода.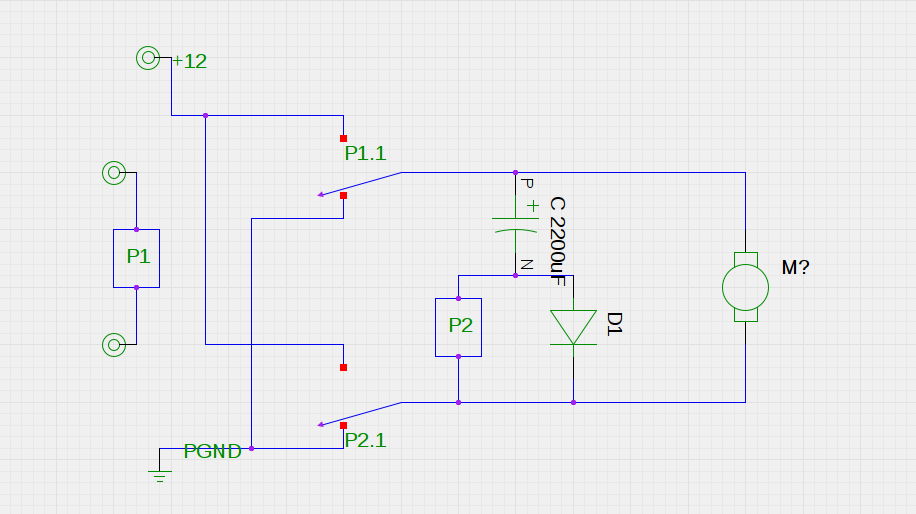 Если вы потратите время на изучение имеющихся вариантов и соедините это с тщательно продуманными целями движения и методами качественной сборки, ремни могут стать ценными исполнительными механизмами.
Если вы потратите время на изучение имеющихся вариантов и соедините это с тщательно продуманными целями движения и методами качественной сборки, ремни могут стать ценными исполнительными механизмами.
Неподвижные ремни
Рис. 16: Неподвижный ремень [Bell-Everman]
Обзор применения:
Неподвижные ремни аналогичны зубчатым рейкам. Ременный шкив движется по неподвижному ремню так же, как шестерня движется по неподвижной рейке. Хорошо спроектированный фиксированный ремень обеспечивает лучшую повторяемость и меньше проблем с натяжением, чем подвижные ремни. Кроме того, фиксированный ремень более тихий и точный, чем большинство стоек. Однако грузоподъемность и диапазон условий эксплуатации для большинства приводов с фиксированным ремнем ограничены по сравнению со стоечными системами.
фиксированные ремни плюсы и минусы:
- высокая скорость и ускорение потенциал
- Эффективная электростанция Перевод
- широкая доступность частей
- более высокая точность и повторяемость, чем движущиеся ремни
- Относительно высокая стоимость привода в сборе
- Сложность конструкции
- Ограниченная грузоподъемность
Варианты использования ограничены.
- Приводы с фиксированным ремнем, как правило, являются хорошим выбором конструкции в подмножестве приложений, которые включают большинство или все следующие характеристики:
- Длинный ход (2+ метра)
- Легкие нагрузки (менее 25 фунтов или около того)
- Средние и высокие скорости (более 1 метра в секунду)
- Требования к низкому уровню шума
2. Если вам нужен более широкий диапазон возможностей, используйте готовую модель.
- Если ваше приложение не соответствует всем четырем параметрам, упомянутым выше, обычно лучше подходят другие приводы.Однако есть готовые исключения. Одним из них является привод ServoBelt™ Linear
, конструкция которого повышает грузоподъемность и точность, а также позволяет использовать несколько кареток на одну ось.
3. Менее универсальная поддержка, чем для других приводов.
- Системы с фиксированными ремнями не распространены, поэтому вы не найдете большого сообщества пользователей для поддержки.
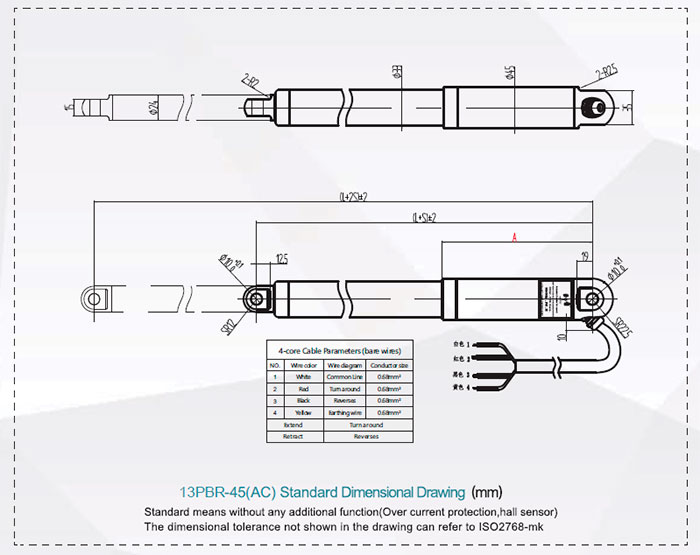
Советы и рекомендации по использованию фиксированных ремней:
1. Обе стороны ремня имеют значение.
- Как и во всех ременных передачах, выбор зубьев имеет решающее значение.Кроме того, в фиксированных ремнях используются натяжные ролики на задней части ремня, поэтому эта конструкция также чувствительна к поверхностным материалам на обратной стороне ремня и . Убедитесь, что вы выбрали ремень с подложкой, рассчитанной на вращение на холостом ходу.
2. Зафиксируйте ролики в нужном положении.
- Калиброванные пружинные ролики эффективно натягивают и оборачивают ремень, но вы должны зафиксировать ролик в нужном положении перед движением. Пружины сжимаются во время ускорения, что приводит к мгновенной потере положения и даже к постоянной потере положения, если зубья прыгают.Кроме того, податливость пружин создаст динамические проблемы в системе.
3. Правильно зажмите концы.
- Натяжные ролики с фиксированным ремнем обеспечивают большое количество зубьев в зацеплении с ведущим шкивом. Однако зацепление зубьев в концевых зажимах часто упускается из виду. Зубья концевых зажимов изгибаются при ускорении, поэтому убедитесь, что на обоих концевых зажимах зацеплено не менее 6 зубьев.
 Однако зацепление зубьев в концевых зажимах часто упускается из виду. Зубья концевых зажимов изгибаются при ускорении, поэтому убедитесь, что на обоих концевых зажимах зацеплено не менее 6 зубьев.
Однако зацепление зубьев в концевых зажимах часто упускается из виду. Зубья концевых зажимов изгибаются при ускорении, поэтому убедитесь, что на обоих концевых зажимах зацеплено не менее 6 зубьев.4. Двигатель управляет не только полезной нагрузкой.
- На конструкции движущихся двигателей влияют вес двигателя, эффективная нагрузка электронной цепи (которая зависит от положения), храповой эффект электронной цепи, усилие изгиба кабеля и т. д.Это добавляет дополнительный вес, а также переменное сопротивление, зависящее от скорости, в положениях и . Существуют и другие приводы, которые испытывают эту проблему, особенно реечные и шестеренчатые, но если у вас есть реечная система, рассчитанная на нагрузку в 1000 фунтов, эти эффекты обычно незначительны. . С другой стороны, движущиеся ремни часто рассчитаны на легкие нагрузки, без редуктора и с небольшим двигателем. В результате двигатель, рассчитанный только на полезную нагрузку, не будет иметь мощности (или передачи), чтобы скрыть динамические проблемы, вызванные этими дополнительными компонентами. Так что оставьте место для двигателя, который больше, чем указано в расчетах полезной нагрузки.
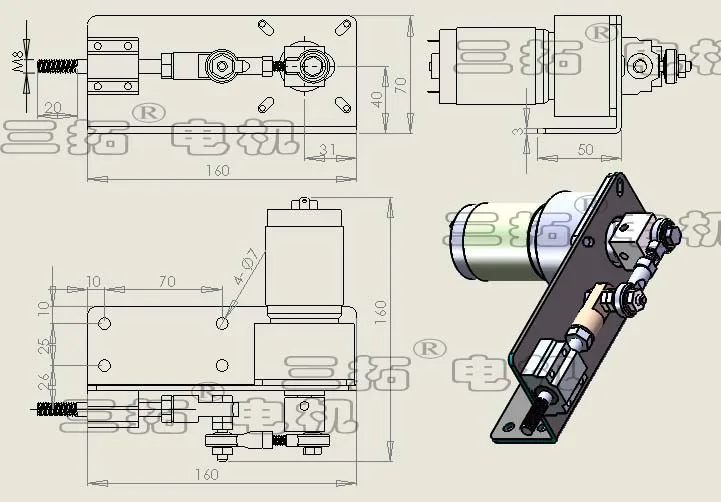 Так что оставьте место для двигателя, который больше, чем указано в расчетах полезной нагрузки.
Так что оставьте место для двигателя, который больше, чем указано в расчетах полезной нагрузки.Резюме:
Фиксированные ремни являются эффективными исполнительными механизмами при правильном применении. OEM-производители, которые используют эти приводы в приложениях с малой нагрузкой и длинным ходом с двигателем, рассчитанным на управление всеми силами (а не только полезной нагрузкой), обычно добиваются успеха. Неудачные компании либо 1) уменьшают размер двигателя, не имея места для более крупного двигателя, либо 2) настраивают систему до тех пор, пока не получат желаемую производительность, но это невозможно повторить в условиях массового производства.Если у вас есть реалистичные ожидания по производительности и размер двигателя, способный справиться со всеми усилиями, фиксированные ремни могут стать основой высокоэффективных осей движения.
Рекомендации, применимые ко всем типам приводов
За последние три десятилетия компания Teknic узнала несколько вещей, применимых ко всем типам приводов:
1.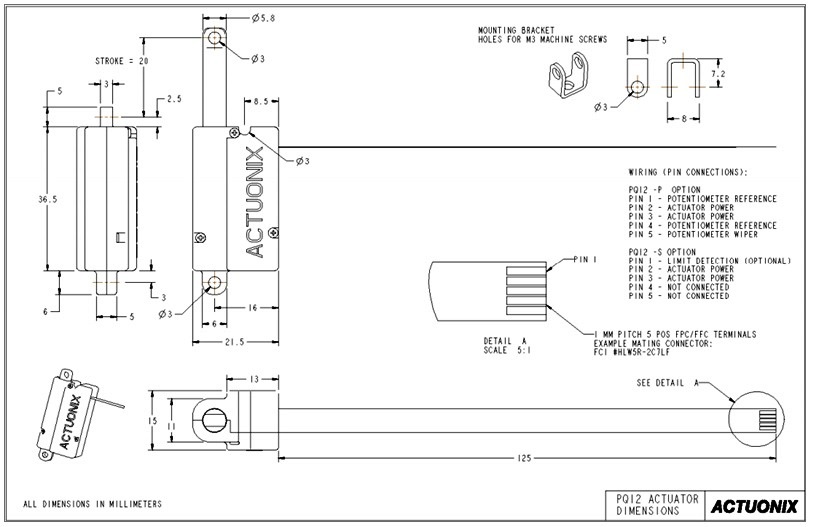 Приводы и их части не являются товаром.
Приводы и их части не являются товаром.
- Компоненты с одинаковыми характеристиками бумаги часто дают совершенно разные результаты в реальных условиях. Приводы и детали механического привода не являются взаимозаменяемыми.Поэтому протестируйте конкретное устройство, которое вы собираетесь использовать, на корпусе, который вы собираетесь использовать, и в среде, в которой вы собираетесь его использовать.
2. Имейте реалистичные ожидания.
- добиться значительно более высокой производительности, чем обычно, для данного типа привода сложно — вы, скорее всего, столкнетесь с отсутствием технологичности или проблемами с текущим обслуживанием. Даже если вы настроили один привод так, чтобы он работал исключительно хорошо для своего класса, накопление допусков и механический износ с течением времени сделают вашу межмашинную производительность (и производительность отдельных машин с течением времени) намного ниже, чем у точно настроенного привода. прототип.
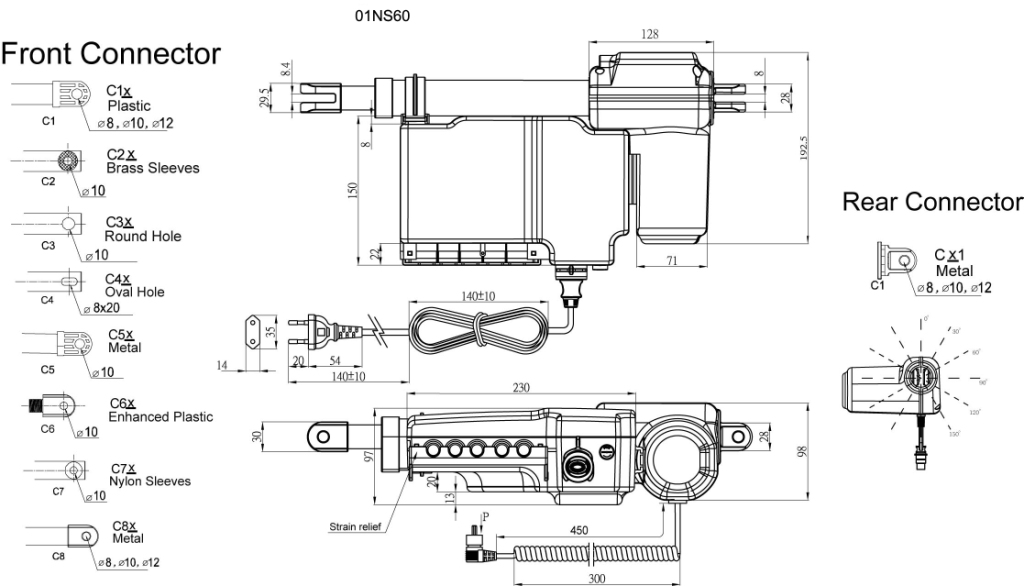 прототип.
прототип.3. Самостоятельно изготовить привод недешево и не просто.
- OEM-производители часто изготавливают собственные приводы, но это непростая задача. Если вы сконструируете свой собственный привод, 1) вам потребуется больше времени, чтобы вывести продукт на рынок, 2) вы потратите больше времени на разработку привода и меньше времени на совершенствование машинных процессов, и 3) ваши реальные затраты почти всегда выше, чем на первом этапе. оценочно (и вы не всегда сэкономите деньги по сравнению с готовыми решениями). Таким образом, если вы не производите как минимум сотни машин в год или у вас есть уникальные ограничения, мы настоятельно рекомендуем вам рассмотреть возможность интеграции готового привода.
4. Недорогие отдельные компоненты привода не обязательно означают недорогие приводы.
- Отдельные детали, которые изначально дешевле, могут потребовать более дорогостоящих и обширных производственных процессов, поэтому общая стоимость в целом может оказаться больше, чем вы ожидаете. Например, вы можете купить ремень и шкив менее чем за 100 долларов, а шариковый винт и гайка (с такой же длиной хода) могут стоить 500 долларов. Однако ременные приводы часто требуют дополнительной обработки, большего количества производственных операций и периода обкатки.Это увеличивает стоимость приводов с ременным приводом «под ключ», поэтому стандартный привод с шарико-винтовой передачей иногда стоит меньше денег, чем стандартный привод с ременным приводом. Важно больше сосредоточиться на требованиях к вашему приложению, а не на стоимости подкомпонентов. Вот график, сравнивающий цену отдельных деталей с ценой готового привода (цены на некоторые специальные приводы намного выше, но мы удалили их, чтобы показать стандартный ценовой диапазон).
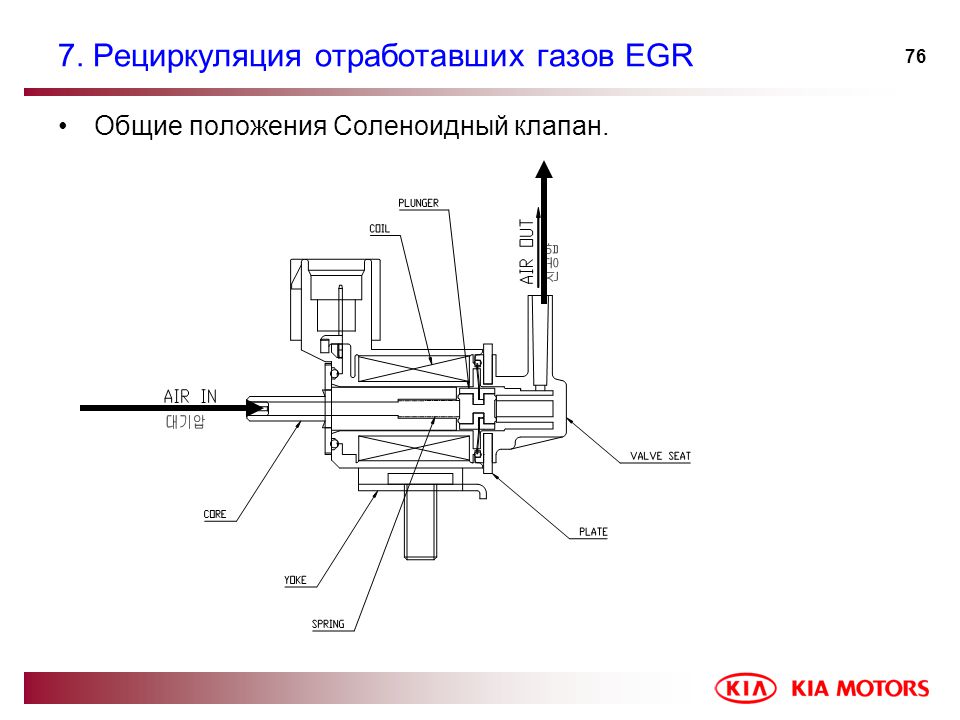 Например, вы можете купить ремень и шкив менее чем за 100 долларов, а шариковый винт и гайка (с такой же длиной хода) могут стоить 500 долларов. Однако ременные приводы часто требуют дополнительной обработки, большего количества производственных операций и периода обкатки.Это увеличивает стоимость приводов с ременным приводом «под ключ», поэтому стандартный привод с шарико-винтовой передачей иногда стоит меньше денег, чем стандартный привод с ременным приводом. Важно больше сосредоточиться на требованиях к вашему приложению, а не на стоимости подкомпонентов. Вот график, сравнивающий цену отдельных деталей с ценой готового привода (цены на некоторые специальные приводы намного выше, но мы удалили их, чтобы показать стандартный ценовой диапазон).
Например, вы можете купить ремень и шкив менее чем за 100 долларов, а шариковый винт и гайка (с такой же длиной хода) могут стоить 500 долларов. Однако ременные приводы часто требуют дополнительной обработки, большего количества производственных операций и периода обкатки.Это увеличивает стоимость приводов с ременным приводом «под ключ», поэтому стандартный привод с шарико-винтовой передачей иногда стоит меньше денег, чем стандартный привод с ременным приводом. Важно больше сосредоточиться на требованиях к вашему приложению, а не на стоимости подкомпонентов. Вот график, сравнивающий цену отдельных деталей с ценой готового привода (цены на некоторые специальные приводы намного выше, но мы удалили их, чтобы показать стандартный ценовой диапазон).5. Не тратьте лишние деньги на прецизионные компоненты, если только вы не хотите сделать всю машину точной.
- Зачастую самым слабым звеном в отношении точности станка является не механический привод. Такие проблемы, как тепловое расширение (и сжатие), дефекты обработки, изгиб и вибрация рамы, точность двигателя и т. д., могут существенно повлиять на общую точность. Если вы не уделите пристальное внимание всем факторам, влияющим на точность, дополнительная точность дорогих компонентов может быть потрачена впустую. Например, мы часто видим использование прецизионных шлифованных шарико-винтовых пар, тогда как гораздо более дешевые катаные шарико-винтовые пары не оказали бы существенного влияния на общую точность станка.
 д., могут существенно повлиять на общую точность. Если вы не уделите пристальное внимание всем факторам, влияющим на точность, дополнительная точность дорогих компонентов может быть потрачена впустую. Например, мы часто видим использование прецизионных шлифованных шарико-винтовых пар, тогда как гораздо более дешевые катаные шарико-винтовые пары не оказали бы существенного влияния на общую точность станка.
д., могут существенно повлиять на общую точность. Если вы не уделите пристальное внимание всем факторам, влияющим на точность, дополнительная точность дорогих компонентов может быть потрачена впустую. Например, мы часто видим использование прецизионных шлифованных шарико-винтовых пар, тогда как гораздо более дешевые катаные шарико-винтовые пары не оказали бы существенного влияния на общую точность станка.6. Обязательно учитывайте инерцию отраженной нагрузки к двигателю.
- Мы видим, что некоторые модели электродвигателей в некоторых приложениях успешно контролируют нагрузку в тысячи фунтов, однако те же самые модели двигателей не могут адекватно контролировать нагрузку всего в 5 фунтов в других приложениях. Разница между успехом и неудачей в этих приложениях заключается в рычажном воздействии двигателя на нагрузку. Лучшим индикатором рычажного воздействия является расчет отраженной инерции нагрузки обратно к двигателю. Teknic пережила сотни болезненных переделок и десятки полных отказов машин из-за того, что инженеры упустили из виду этот относительно простой расчет в начале процесса спецификации.

Выбор наилучшего привода для вашего приложения — наше резюме.
Теперь, когда мы выделили различные приводы, как вам сделать выбор? Вот наши предложения:
1. На выбор наиболее подходящего привода влияет множество факторов. Вы захотите рассмотреть эти факторы в свете вашего приложения и создать список ответов, чтобы выбрать наиболее подходящий привод.
- Количественно определите вес всей подвижной нагрузки .Обязательно включите все движущиеся части в привод (не забудьте электронную цепь!).
- Тщательно рассмотрите свои количественные цели движения, такие как точность, повторяемость, время движения и т. д.
- Перечислите свои качественные цели (например, слышимый шум) и расставьте их по приоритетам.
- Учитывайте рабочую среду машины. Он грязный или чистый? Тихая лаборатория или шумный цех?
- Сколько технического обслуживания (или неправильного обращения) вы ожидаете от операторов машин?
- Тщательно продумайте свои производственные возможности. Ваша производственная команда состоит из мастеров старого мира или рабочих, которые следуют основным рабочим инструкциям, или что-то среднее между ними? Наборы навыков, необходимые для создания различных типов приводов, различаются. Убедитесь, что производственные требования к вашему приводу совпадают с набором навыков вашей производственной группы.
 Ваша производственная команда состоит из мастеров старого мира или рабочих, которые следуют основным рабочим инструкциям, или что-то среднее между ними? Наборы навыков, необходимые для создания различных типов приводов, различаются. Убедитесь, что производственные требования к вашему приводу совпадают с набором навыков вашей производственной группы.
Ваша производственная команда состоит из мастеров старого мира или рабочих, которые следуют основным рабочим инструкциям, или что-то среднее между ними? Наборы навыков, необходимые для создания различных типов приводов, различаются. Убедитесь, что производственные требования к вашему приводу совпадают с набором навыков вашей производственной группы.2. Теперь, когда у вас есть перечень потребностей и возможностей, используйте информацию в этой статье для рассмотрения различных приводов. Есть хороший шанс, что один привод выделяется.
- Если на данный момент есть еще несколько вариантов, у вас довольно гибкое приложение. В этом случае выберите актуатор, который проще всего внедрить в вашу машину.
3. С выбранным приводом и количественными требованиями:
- Если вы производитель крупносерийного оборудования, спроектируйте свой собственный привод, используя целостный общесистемный подход. Подумайте о том, чтобы начать с готового привода аналогичной конструкции, чтобы другие дисциплины в команде разработчиков (например, программное обеспечение) не застряли в ожидании, пока ваша механика будет готова.
- Если вы производите продукты с использованием автоматизированного оборудования, даже если вы используете много осей движения, не делайте свои собственные приводы. Сузьте свой выбор до нескольких готовых вариантов и протестируйте их, чтобы прийти к окончательному выбору. Большинству производственных компаний лучше всего сосредоточиться на улучшении своих продуктов и процессов, а не на кривой обучения, которую уже понимают компании-производители приводов.
- Если вы ищете несколько приводов, купите лучший, который позволяет бюджет, немного увеличьте размер двигателя, чтобы быть в безопасности, и забудьте об обширных исследованиях.Время — деньги.
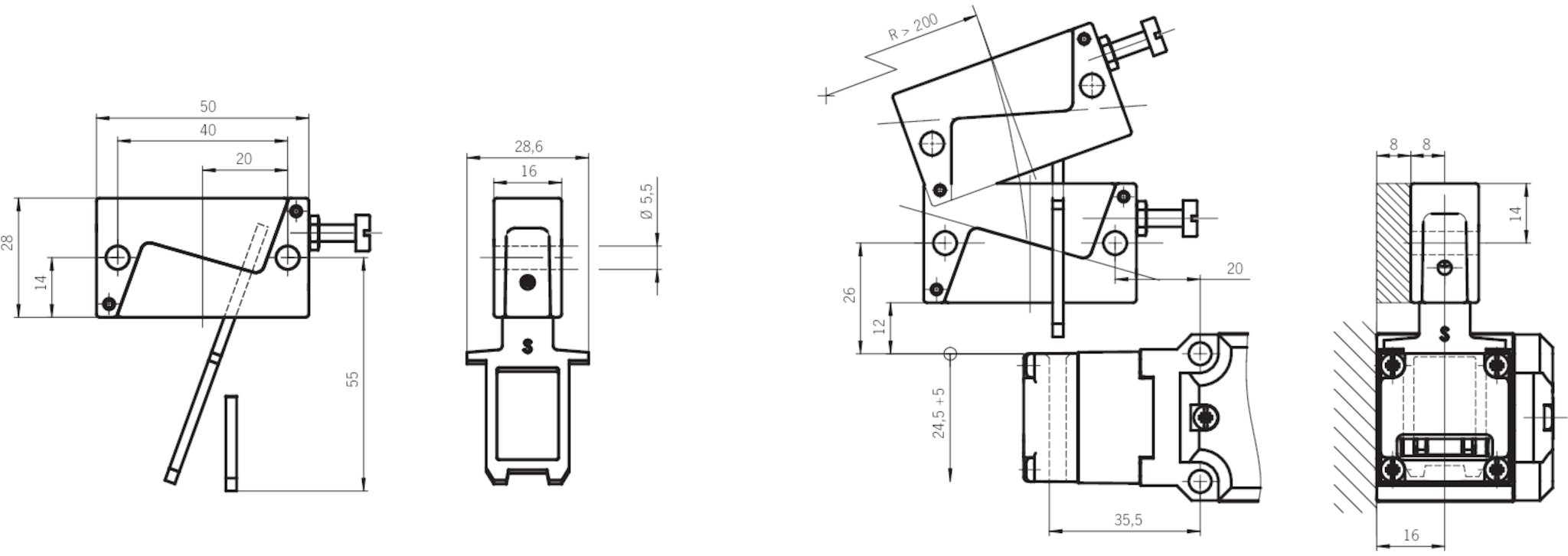
Последняя точка. Ваше приложение представляет собой систему. Используйте сбалансированный подход. Система хороша ровно настолько, насколько хорошо ее самое слабое звено. Даже самые лучшие в мире двигатели мало что могут сделать с плохой механикой — или даже с хорошей механикой, если она применяется неправильно. Тщательно определите свои требования и используйте целостный подход.
6 Соображения по выбору электрических линейных приводов
Эти предварительные соображения могут помочь вам получить максимальную отдачу от вашего следующего проекта линейного перемещения
Рассмотрите общую картину
Когда инженеры проектируют электромеханическую систему, в которой используются электрические линейные приводы, а не другие технологии, такие как гидравлика или пневматика, может быть несколько способов решения одной задачи.Все варианты отличаются точностью, производительностью, занимаемой площадью, общей стоимостью владения и многими другими факторами. Прежде чем принять решение о типе электрического линейного привода, который будет использоваться для данного проекта, очень важно рассмотреть общую картину ваших операций и целей (а не просто сосредоточиться только на технических характеристиках продукта). Это в конечном итоге максимизирует рентабельность ваших инвестиций в оборудование, а также ускорит время выхода на рынок.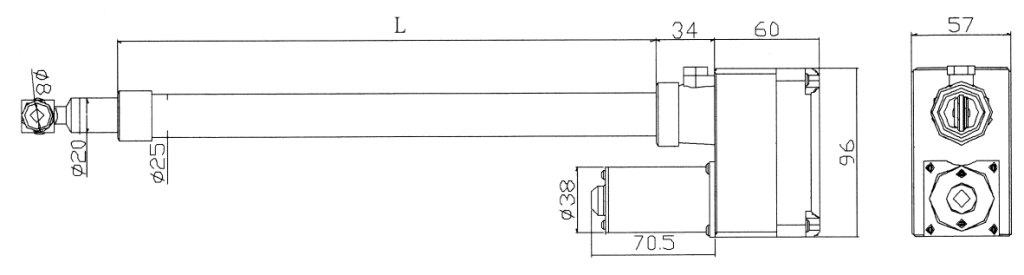
6 советов, которые нужно знать перед покупкой линейного привода
Вы и ваша команда разработчиков оборудования искали надежный линейный привод для вашего следующего проекта? Когда на карту поставлены безопасность, эффективность и производительность, вам нужно будет выделить время для исследований, прежде чем совершать покупку. Также важно учитывать очевидные преимущества современных электромеханических приводов по сравнению с традиционными приводами с гидравлическим или пневматическим приводом. Заблаговременный выбор подходящего привода также может ускорить выход на рынок, и вы получите максимальную выгоду в долгосрочной перспективе по мере развития потребностей вашего оборудования и помещений.
1. Окружающая среда и безопасность.
Электромеханические приводы безопаснее и экологичнее.
Выбор правильного устройства может более эффективно предотвращать несчастные случаи на вашем предприятии и для ваших клиентов. Кроме того, их конструкции создают меньшую нагрузку на окружающую среду.
Кроме того, их конструкции создают меньшую нагрузку на окружающую среду.
- В отличие от своих гидравлических и пневматических аналогов, электромеханические приводы не требуют громоздких вспомогательных систем, таких как жидкости, масла, шланги и насосы. Это устраняет риск опасных утечек, которые могут создать опасность скольжения и загрязнения окружающей среды (процессы управления такими случаями также очень дороги) .
- Электромеханические приводы представляют собой автономные устройства, требующие лишь минимальной периодической смазки (внутри герметичного устройства). Отсутствуют вредные или опасные жидкости, которые могут попасть в окружающую среду.
- Электромеханические приводы имеют КПД >90 %, поэтому они потребляют меньше энергии и, следовательно, более экологичны (меньше нагрузки на ресурсы).
2. Учитывайте общую стоимость эксплуатации, чтобы максимизировать рентабельность инвестиций.
Другие технологии могут показаться более эффективными с точки зрения затрат. Однако очевидно, что электромеханические приводы представляют собой наилучшую долгосрочную инвестицию.
Однако очевидно, что электромеханические приводы представляют собой наилучшую долгосрочную инвестицию.
- Расширен прямой контроль над профилями движения электромеханических приводов. Это устраняет необходимость в дополнительных дополнительных компонентах управления (снижение затрат на оборудование). Изменениями в настройке легко управлять с помощью изменений программного обеспечения (снижение затрат на поддержку).
- Более чистая работа, меньшее техническое обслуживание и более длительный срок службы в конечном итоге снижают долгосрочные эксплуатационные расходы.
- Электромеханические приводы имеют КПД >90%. Это, в свою очередь, снижает энергопотребление и снижает затраты на электроэнергию.
3. Перед покупкой проконсультируйтесь со службой поддержки Linear Motion.
Процесс выбора линейного привода может быть сложным… Зачем бороться без необходимости?
- Потенциальный партнер по линейному перемещению может уже иметь решение, ожидающее решения вашей проблемы.
- Используйте проверенный опыт и возможности специальной и доступной группы разработчиков линейного движения.
- Часто есть несколько способов, которыми электрические линейные приводы могут решить данную прикладную проблему. Каждый из них может иметь разную производительность и влияние на бюджет. Консультация со специалистом по линейному перемещению на ранней стадии процесса разработки поможет вам быстро найти оптимальное решение для наших индивидуальных потребностей.
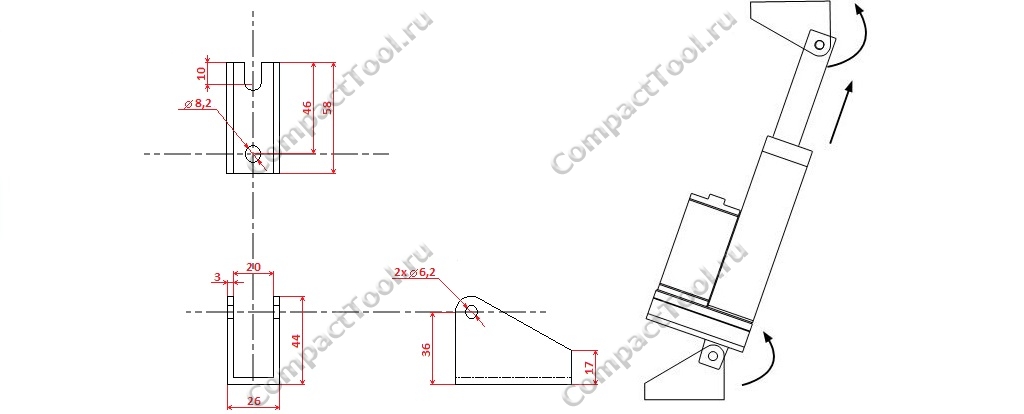
Изучение инженерных возможностей Nook
4. Полностью ознакомьтесь с условиями эксплуатации.
Будет ли оборудование работать в экстремальных условиях?
Важно выбрать правильные материалы и характеристики, которые лучше всего подходят для условий эксплуатации линейного привода.
- Это внутреннее или наружное применение?
- Требования к температуре (тепло, холод, влажность)
- Каковы требования к чистоте (чистая комната, грязная и т. д.)?
- Должен ли он быть взрывозащищенным?
- Подвержены ли они коррозии?
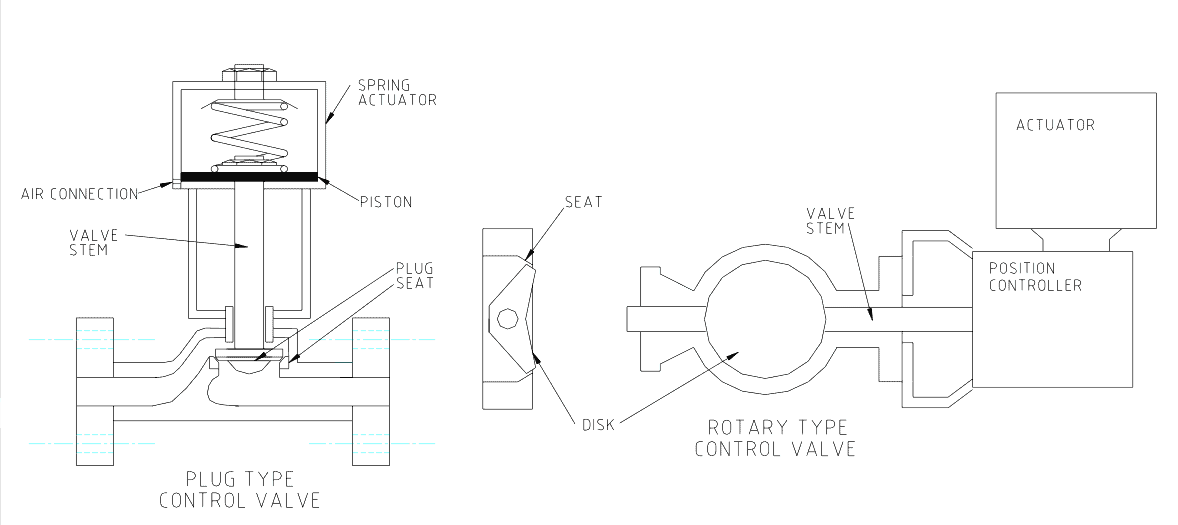 д.)?
д.)?
5. Рассмотрите требования к объекту и будущее состояние вашего проекта.
Если возможно, определите любую необходимую гибкость или расширение вашей системы в будущем.Максимально оптимизируйте долгосрочную стратегию на раннем этапе разработки.
- Каковы текущие и будущие ограничения площади/планировки?
- Какие дополнительные функции потребуются в будущем?
- Электромеханические линейные приводы занимают меньше места на полу, потому что они автономны и не требуют внешнего вспомогательного оборудования, такого как воздухопроводы, шланги, жидкости, компрессоры или насосы.
- Электрические линейные приводы хорошо адаптируются к изменениям, потому что они легко программируются, а некоторые версии имеют широкие возможности перенастройки.
Линейка модульных линейных приводов Nook идеально подходит для оптимизации существующих и будущих требований к компоновке.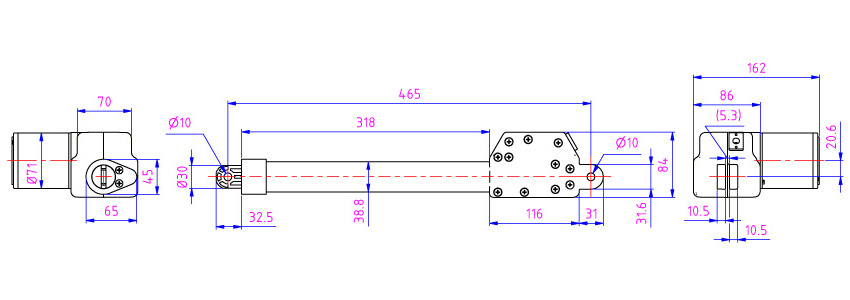 Их можно легко конфигурировать и перенастраивать, чтобы наилучшим образом соответствовать эволюции вашего процесса и оборудования. Однако, как правило, все линейки автономных электромеханических приводов лучше подходят для приложений с ограниченным пространством.
Их можно легко конфигурировать и перенастраивать, чтобы наилучшим образом соответствовать эволюции вашего процесса и оборудования. Однако, как правило, все линейки автономных электромеханических приводов лучше подходят для приложений с ограниченным пространством.
6. Как линейный привод будет взаимодействовать со всей системой?
Значительно сократите цикл разработки за счет предварительного планирования всей системы линейного перемещения.В частности, как электроника будет взаимодействовать с механикой.
- Какой тип привода необходим? (Сервопривод, шаговый двигатель или двигатель переменного тока и т. д.)
- Насколько точно требуется позиционирование?
- Какие датчики требуются (концевые выключатели, энкодеры и т. д.)
- Как его нужно монтировать?
- Требуется ли защита?
Рассмотрите возможность использования поставщика линейных перемещений, который предлагает комплексные решения.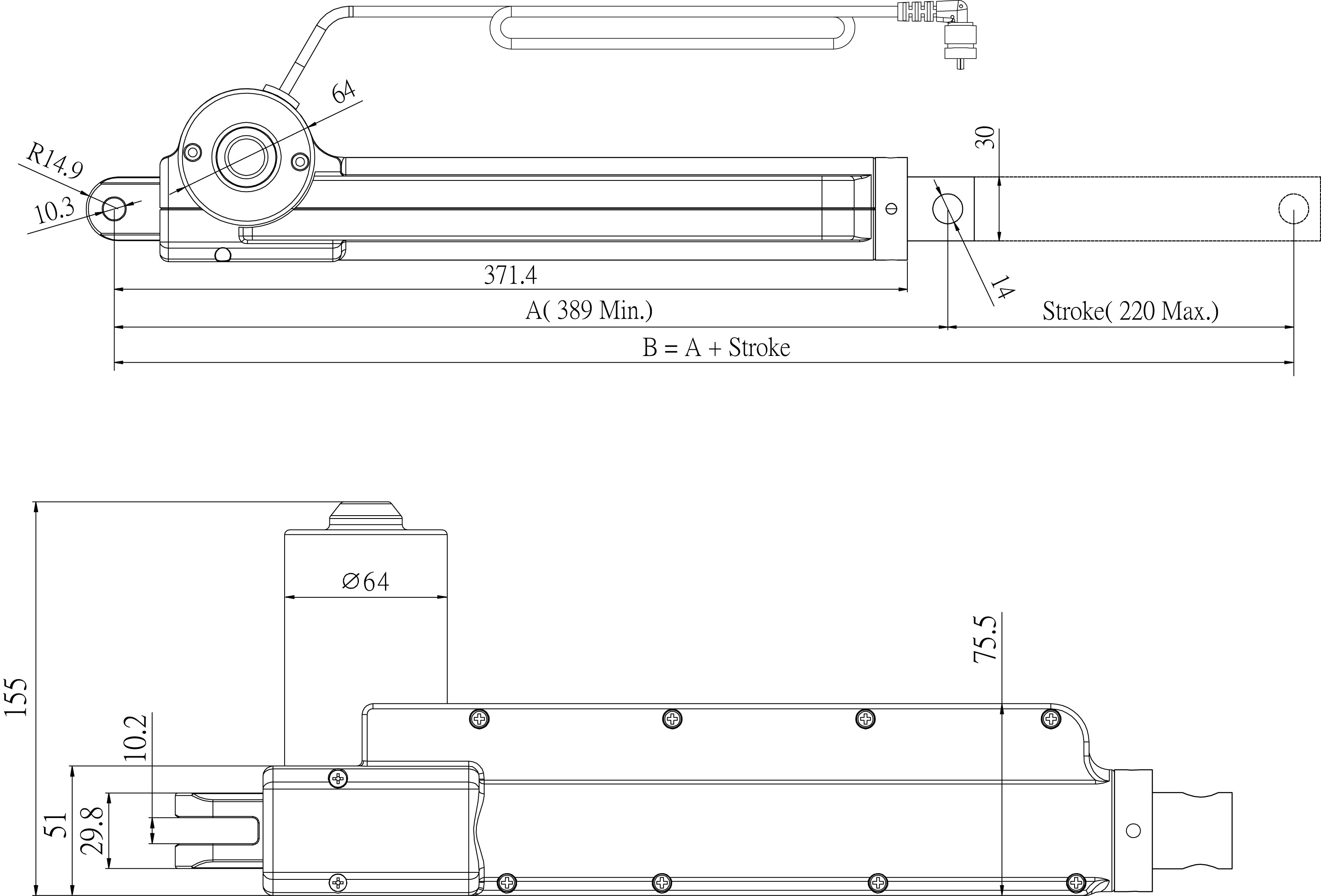
Различные типы электрических линейных приводов включают:
Модульный линейный привод — отлично подходит для задач позиционирования XYZ.
Электрический цилиндр — Отлично подходит для тяжелых условий эксплуатации и наружного применения.
Программируемый привод — идеально подходит, когда необходимы точное позиционирование и управление.
Коммерческие приводы CC — идеально подходят для недорогих приложений с меньшей нагрузкой.
Рассматриваете ли вы электрические линейные приводы в качестве замены линейных устройств с гидравлическим или пневматическим приводом?
Помощь с приложением
О платформе SFX – SimFeedback – SFX-100
Система включает в себя 4x SFX-100 (актуатор) + система SimFeedback (программное обеспечение для ПК + прошивка Arduino).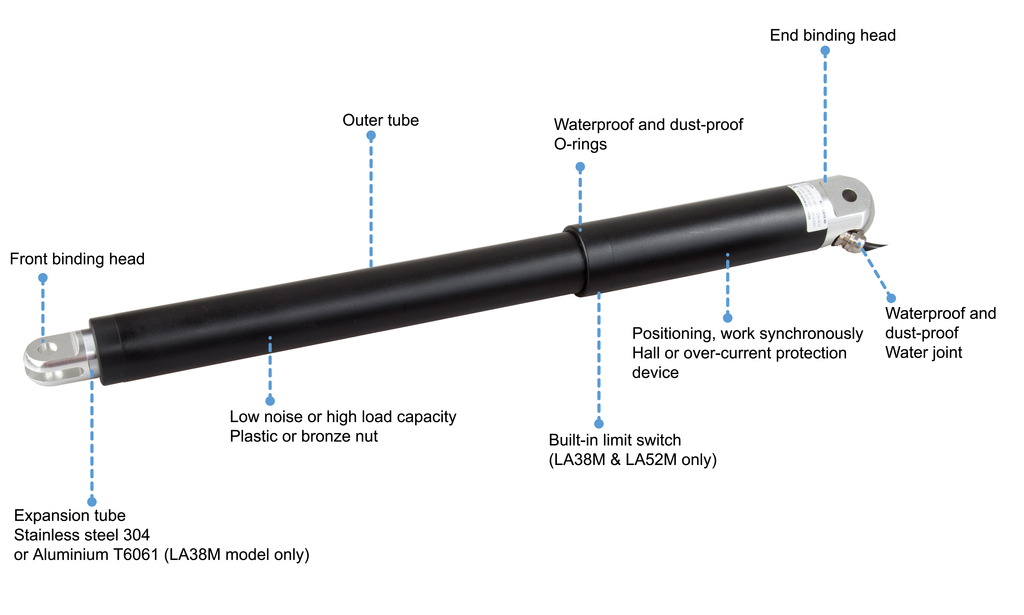 В отличие от коммерческой системы, это система DIY. Вам нужно собрать приводы, подключить контроллер, прошить прошивку и настроить.
В отличие от коммерческой системы, это система DIY. Вам нужно собрать приводы, подключить контроллер, прошить прошивку и настроить.
Это конструкция «движитель платформы». В том, что платформа движется с помощью 4 приводов, что позволяет выполнять движения по крену, тангажу и подъему. Это, в свою очередь, позволяет вам получить симулированные эффекты Surge и Sway. Эта комбинация движений позволит вам получить «сигналы движения» — поверхность гоночной трассы становится неровной в зону торможения, рябь на полосе грохота, подрезание колбасного бордюра, нажатие на тормоза, переключение передач, натирание краски другими предметами. машины.
Программное обеспечение SimFeedback также имеет выходные данные для звуковых эффектов через звуковую карту, таких как вибрация RPM.
Преобразование телеметрии в сигналы движения
Чтобы генерировать движение, SimFeedback получает телеметрию (через систему плагинов с открытым исходным кодом) из игры и преобразует телеметрию в положения приводов с высокой частотой.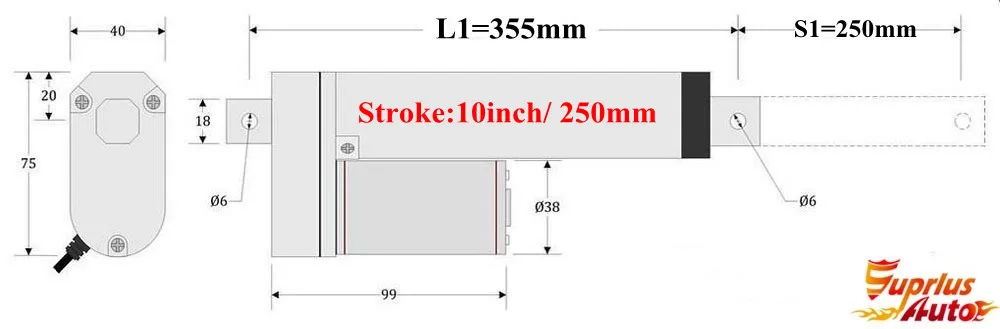 Ряд параметров конфигурации определяет, как происходит этот перевод.
Ряд параметров конфигурации определяет, как происходит этот перевод.
Например: при резком торможении физический движок игры определил отрицательное значение ускорения -1,2G, которое будет отправлено из игры в переменной «AccelG».SimFeedbacks считывает это значение и отправляет на эффекты, использующие эту переменную. Обычно это будет эффект «Surge», -1,5 может соответствовать -12% на графике уставок. Это будет цель, к которой приводу(ам) необходимо переместиться на основе различных настроек и предыдущего положения приводов.
Чем лучше телеметрия физики выводится из вашего игрового движка, тем лучше будет опыт работы с вашей установкой SFX — от игры к игре точность физики сильно различается с точки зрения того, что они вычисляют и отправляют, тем лучше это более «живой» будет ощущаться ваша установка.
Сигналы на движения привода
Выходные данные движения отправляются на Arduino, на котором запущена специальная прошивка SimFeedback . Плата Arduino подключена к каждому сервоприводу переменного тока.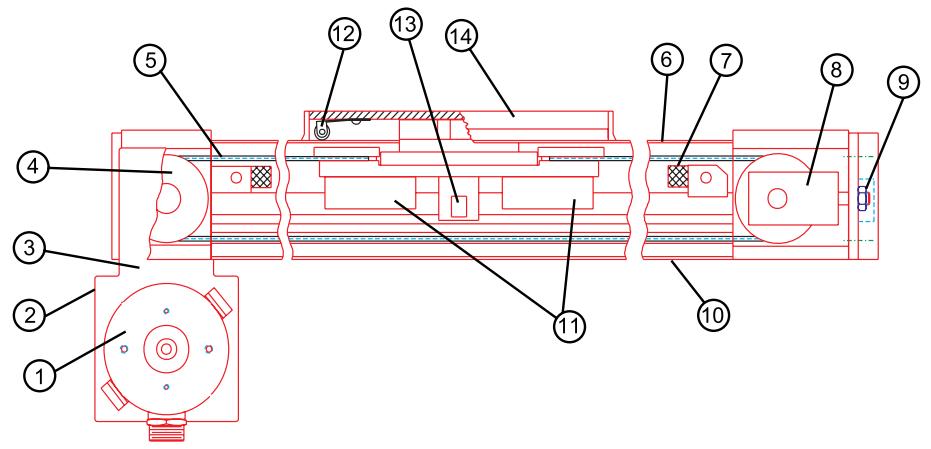 Каждый из этих приводов (питание от сети переменного тока 220 В), в свою очередь, посылает сигналы соответствующим серводвигателям, расположенным поверх каждого привода SFX-100. Сервопривод вращается по часовой стрелке/против часовой стрелки, что преобразуется в линейное (вертикальное) перемещение с помощью стандартного шарикового винта и, в свою очередь, перемещает каждый угол вашей сим-установки вверх/вниз.
Каждый из этих приводов (питание от сети переменного тока 220 В), в свою очередь, посылает сигналы соответствующим серводвигателям, расположенным поверх каждого привода SFX-100. Сервопривод вращается по часовой стрелке/против часовой стрелки, что преобразуется в линейное (вертикальное) перемещение с помощью стандартного шарикового винта и, в свою очередь, перемещает каждый угол вашей сим-установки вверх/вниз.
Примечание. Это система с замкнутым контуром, не требующая концевых выключателей или калибровки. Это делает систему быстрой и простой. SimFeedback всегда запускается с приводами из полностью опущенного положения, при нажатии кнопки «Пуск» приводы перемещаются в известное предполагаемое начальное положение.
Вот схема всей системы
Пневматический поворотный привод — Принцип работы
Рисунок 1: Пневматические поворотные приводы
Пневматический поворотный привод использует сжатый воздух для выработки рабочей энергии.Некоторые из них разработаны специально для дистанционного управления клапанами. Чистый, сухой воздух может подаваться через центральную станцию сжатого воздуха или, в случае системы сжатого газа, из технологического газа. Затем отработанный газ может быть выпущен в воздух или в технологический трубопровод с более низким давлением ниже по потоку. Они обычно используются для автоматизации и дистанционного управления четвертьоборотными или многооборотными клапанами, такими как шаровые краны или дроссельные заслонки.
Чистый, сухой воздух может подаваться через центральную станцию сжатого воздуха или, в случае системы сжатого газа, из технологического газа. Затем отработанный газ может быть выпущен в воздух или в технологический трубопровод с более низким давлением ниже по потоку. Они обычно используются для автоматизации и дистанционного управления четвертьоборотными или многооборотными клапанами, такими как шаровые краны или дроссельные заслонки.
Пневматический поворотный привод состоит из одной или нескольких воздушных камер с поршнем или сильфонной диафрагмой.В зависимости от конструкции давление воздуха заставляет поршень или диафрагму двигаться, создавая прямолинейное или вращательное движение. Если созданное движение является линейным, то оно внутренне преобразует линейное движение во вращательное движение. Пневматические поворотные приводы долговечны, обеспечивают высокое усилие по сравнению с их размером и могут использоваться в опасных средах.
Как правило, для привода поворотного клапана используется поворотный привод.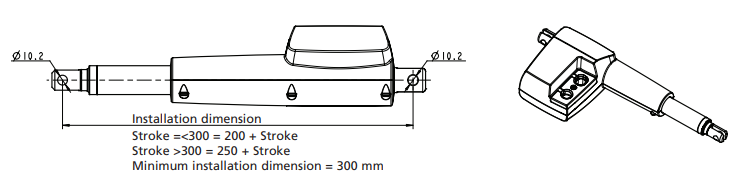 Однако существуют также конструкции, в которых используются пневматические цилиндры, которые создают линейное движение для создания крутящего момента с помощью поворотных рычагов или подшипников.Однако использование пневматических поворотных приводов для этих приложений может упростить конструкцию и увеличить срок службы. Пневматические поворотные приводы автономны, поэтому их детали не подвергаются воздействию загрязняющих веществ и агрессивных сред, а это означает, что они с меньшей вероятностью потребуют обслуживания в течение всего срока службы.
Однако существуют также конструкции, в которых используются пневматические цилиндры, которые создают линейное движение для создания крутящего момента с помощью поворотных рычагов или подшипников.Однако использование пневматических поворотных приводов для этих приложений может упростить конструкцию и увеличить срок службы. Пневматические поворотные приводы автономны, поэтому их детали не подвергаются воздействию загрязняющих веществ и агрессивных сред, а это означает, что они с меньшей вероятностью потребуют обслуживания в течение всего срока службы.
Одностороннего действия против двойного действия
Пневматические приводы могут быть одностороннего или двустороннего действия. В приводе двойного действия воздух подается к обеим сторонам поршня.Более высокое давление воздуха с обеих сторон создает движение для открытия и закрытия клапана. С другой стороны, в приводе одностороннего действия воздух подается с одной стороны и используется одна или несколько пружин для возврата поршня в исходное положение. Привод с пружинным возвратом может быть спроектирован так, чтобы он закрывался или открывался пружиной. Эти приводы экономят сжатый воздух, однако приводы двойного действия обеспечивают лучший контроль и работают с более высокой частотой циклов. В некоторых случаях преимуществом приводов с пружинным возвратом может быть возврат в исходное положение в случае потери давления или мощности.
Привод с пружинным возвратом может быть спроектирован так, чтобы он закрывался или открывался пружиной. Эти приводы экономят сжатый воздух, однако приводы двойного действия обеспечивают лучший контроль и работают с более высокой частотой циклов. В некоторых случаях преимуществом приводов с пружинным возвратом может быть возврат в исходное положение в случае потери давления или мощности.
Дизайн
В пневматических поворотных приводах линейная сила поршня преобразуется в крутящий момент с помощью таких механизмов, как зубчатая рейка или кулисный механизм. Однако приводы лопастного типа могут напрямую создавать крутящий момент от давления воздуха.
Зубчатая рейка
Зубчатая рейка, как показано на рисунке 2, состоит из круглой шестерни (шестерни), находящейся в зацеплении с линейной шестерней (рейкой). При срабатывании поршень, закрепленный на рейке, перемещается прямолинейно. Благодаря зубчатому соединению с шестерней он вращает ее вместе с прикрепленным выходным валом, эффективно превращая прямолинейное движение во вращательное.
Рисунок 2. Реечная передача слева и реечный поворотный привод двойного действия справа
Часто два поршня и рейки устанавливаются на противоположных сторонах друг друга, чтобы удвоить величину крутящего момента на шестерне, как показано на рис. 3. В этом приводе двойного действия две боковые камеры заполнены сжатым воздухом, который толкает поршни к центру. Для возврата поршней в исходное положение камера в центре, в свою очередь, герметизируется.
Рисунок 3. Поворотные приводы двойного действия с реечной передачей, одна рейка слева и одна справа
Реечная конструкция имеет довольно высокий механический КПД. Они могут производить диапазон крутящего момента от пары Нм до нескольких тысяч Нм.
Изношенные реечные приводы склонны к люфту, вызванному изношенными шестернями и зазорами между шестернями, что приводит к снижению точности. Там, где важна точность позиционирования, рекомендуются версии с двумя стойками.По сравнению с лопастными приводами реечные конструкции имеют больший диапазон колебаний.
Скотч-хомут
Рисунок 4: Приводы с кулисой
В механизме кулисного механизма вал поршня взаимодействует с вращающимся валом через штифт и прорезь, как показано на рис. 5. Линейное движение вала вызывает вращение штифта. Приводы с кулисой могут быть с пружинным возвратом или двойным действием. Эти приводы также могут быть оснащены двумя противоположными поршнями для удвоения крутящего момента на выходном валу, как показано на рис. 5 справа.Приводы с кулисой представляют собой приводы для тяжелых условий эксплуатации, создающие крутящий момент в диапазоне от нескольких тысяч до сотен тысяч Нм.
Рисунок 5: Пневматические приводы с пружинным возвратом кулисного механизма (одностороннего действия)
Лопастной
Привод лопастного типа, показанный на рисунке 6 , имеет камеру с валом, который проходит через нее, и с ней соединена лопасть. Когда сжатый воздух подается на одну сторону лопасти, перепад давления заставляет лопасть и вал вращаться.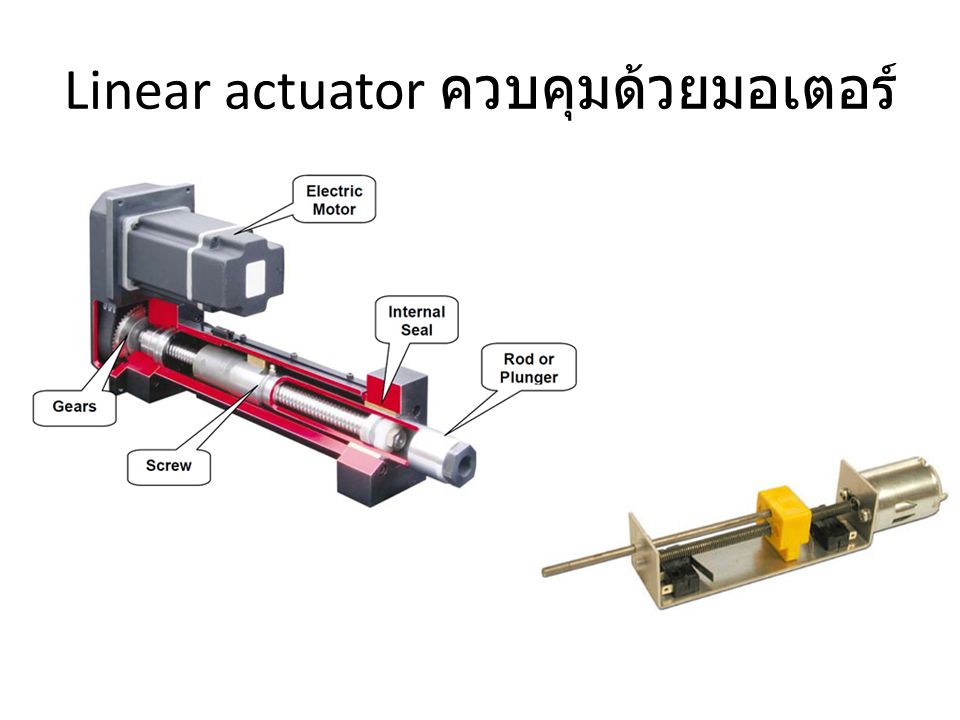
Рисунок 6: Внутренняя часть камеры лопастного привода слева и лопастного привода справа
Приводы лопастного типапредставляют собой приводы для легких режимов работы, обеспечивающие крутящий момент в диапазоне от долей Нм до нескольких сотен.Они могут иметь пружинный возврат или двойного действия и поставляться в конфигурации с одной и двумя лопастями. Конфигурации с двумя лопастями обеспечивают более высокие крутящие моменты за счет меньшего диапазона колебаний. Колебания приводов с двумя лопастями варьируются от 90° до 100°, в то время как приводы с одной лопастью могут иметь диапазон до 280°.
Критерии выбора
Первым шагом при выборе пневматического поворотного привода является определение типа привода, наиболее подходящего для вашего применения. В то время как приводы с кулисой в основном используются для тяжелых условий эксплуатации , целесообразно рассмотреть ваши варианты при выборе поворотного привода для легких и средних условий эксплуатации .
Реечные приводы:
- Преимущества:
- Более высокий механический КПД – от 90 до 95 %
- Применение в условиях средней нагрузки
- Высокоскоростное срабатывание
- Больший диапазон колебаний
- Недостатки:
- Склонен к люфту из-за износа
- Чуть дороже
Лопастные приводы:
- Преимущества:
- Как правило, более экономичный по крутящему моменту
- Легкие и средние нагрузки
- Точное позиционирование
- Недостатки:
- Меньший срок службы по сравнению с реечными приводами
- Немного меньший механический КПД в основном из-за утечек вокруг лопасти
- Ограниченный диапазон колебаний
Следующим шагом будет определение размера привода.Пневматические приводы часто характеризуются наиболее важной величиной крутящего момента, который они могут создать или остановить, и это приводит к выбору размера привода.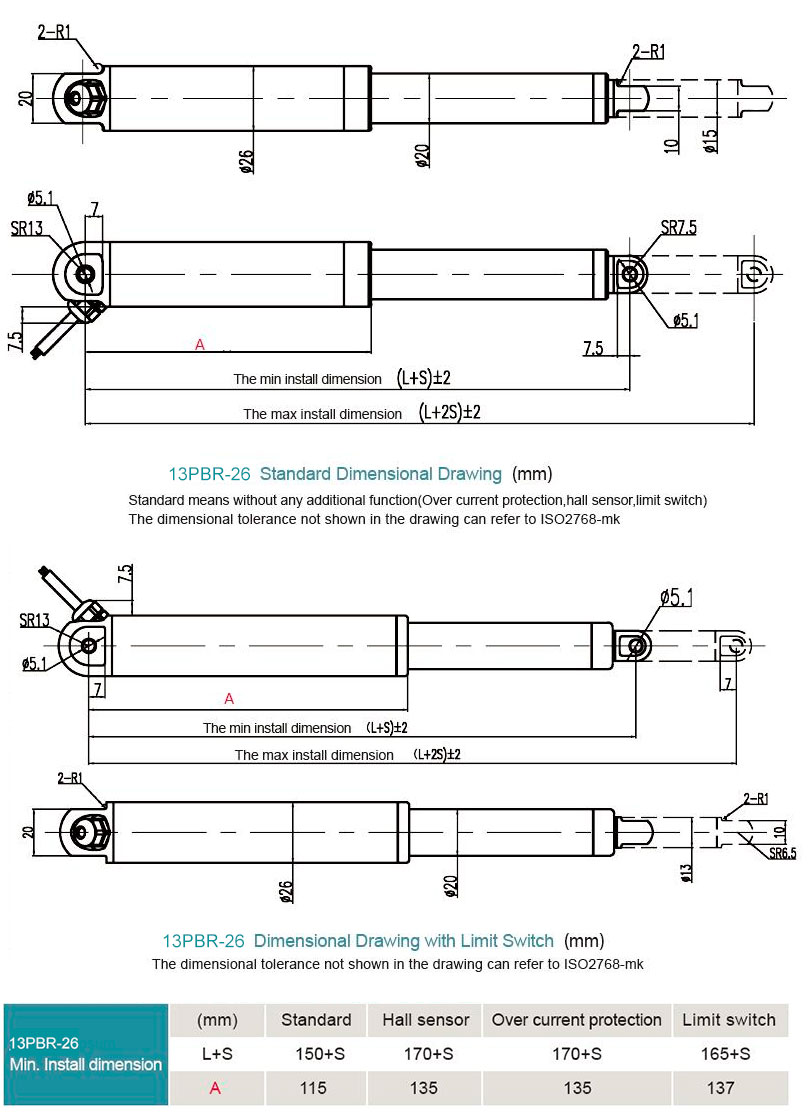 Привод определенного размера также, вероятно, будет обеспечивать диапазон крутящего момента в зависимости от подаваемого на него управляющего давления. Другими критериями, которые следует учитывать при выборе поворотного привода, являются угол поворота, объем воздуха, необходимый для работы, управляющая среда, материалы и интерфейс, включая варианты выходного вала, размеры фланцев и порты пилотного воздуха.
Привод определенного размера также, вероятно, будет обеспечивать диапазон крутящего момента в зависимости от подаваемого на него управляющего давления. Другими критериями, которые следует учитывать при выборе поворотного привода, являются угол поворота, объем воздуха, необходимый для работы, управляющая среда, материалы и интерфейс, включая варианты выходного вала, размеры фланцев и порты пилотного воздуха.
Дополнительная информация
Щелкните одну из ссылок ниже для получения дополнительной информации:
Ежемесячный информационный бюллетень Tameson
- Для кого: Вы! Существующие клиенты, новые клиенты и все, кто ищет информацию о контроле жидкости.
- Почему Ежемесячный информационный бюллетень Tameson: Он четкий, без всякой ерунды и раз в месяц содержит актуальную информацию об отрасли управления жидкостями.
- Что в нем: Объявления о новых продуктах, технические статьи, видеоролики, специальные цены, отраслевая информация и многое другое, на что вам нужно подписаться, чтобы увидеть!
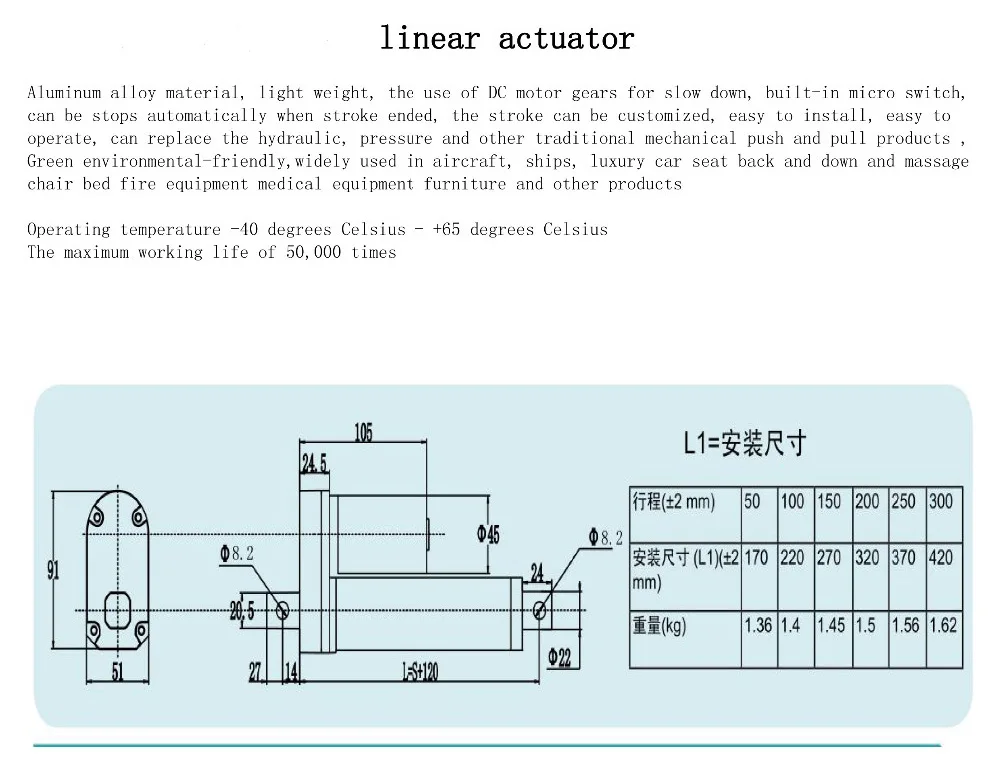
Добавить комментарий